|
Курсовая работа: Разработка АСР температуры обжига цементного клинкера с циклонным теплообменникомДля обеспечения нормальной работы агрегата имеется сигнализация: предпусковая звуковая; состояния механизмов (сигнальные лампы горят ровным светом при работе механизмов и не горят совсем при нормальной их остановке; при аварийной остановке лампы мигают); превышения температуры колосниковой решетки горячей зоны холодильника; превышения верхнего уровня сырья в бункере. 1.3 Требования к автоматизированным системам контроля и управленияВ условиях непрерывности технологического процесса, высокой производительности печных агрегатов система технического, технологического и теплотехнического контроля должна способствовать получению необходимой информации для обеспечения сохранности и работоспособности оборудования, управления технологическим процессом, контроля и соблюдения параметров производства продукции заданного качества. Контроль параметров, характеризующих состояние процесса и режим работы печных установок, а также их измерение при проведении испытаний - один из важнейших в деле технологической наладки исходя из задач как поиска и установления параметров оптимального режима, так и поддержания их при последующей эксплуатации в выбранном оптимальном режиме. При наладке вращающихся печей всегда следует учитывать, что неправильные показания приборов контроля, искаженная информация о состоянии процесса не только бесполезны, но и вредны, так как вызывают неправильные действия оператора, а следовательно, не позволяют обеспечить оптимальный режим работы печной установки и получить максимальную производительность. Поэтому все приборы должны быть исправны и показания их должны соответствовать фактическим значениям измеряемых параметров. Общая задача управления вращающейся печью заключается в нормализации теплового режима и поддержания этого режима в процессе работы с помощью средств контроля и управления. Управление печью и всеми вспомогательными механизмами должно быть сосредоточено у рабочего места оператора. Система автоматического управления технологическим процессом должна удовлетворять следующим требованиям: максимальное отклонение регулируемой величины, статическая ошибка время регулирования, 2. Определение параметров объекта регулированияТаблица 2. Данные экспериментальной кривой разгона
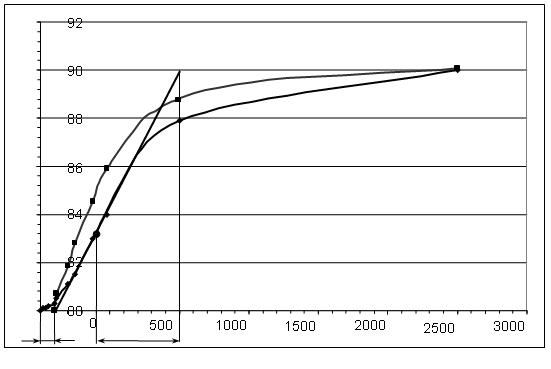
Строим кривую разгона, заданную табл. 2. Эквивалентная
кривая разгона представляет собой экспоненту с запаздыванием τ. По формуле
Таблица 3.
Рис 4. Экспериментальная (а) и эквивалентная (б) кривые разгона. По экспериментальной кривой определяем постоянную времени T0=600с и время запаздывания По формуле Находим среднеквадратическое отклонение экспериментальных данных от характеристики, полученной во время расчетов:
где θ1 (ti) - экспериментальное значении температуры в момент времени ti; θ2 (ti) - расчетное (эквивалентное) значение уровня в момент времени ti; n - число экспериментальных точек. Таким образом, в дальнейших расчетах используем эквивалентный объект, описываемый дифференциальным уравнением 1-го порядка с самовыравниванием и запаздыванием со следующей передаточной функцией:
Величина коэффициента усиления объекта:
Безразмерные показатели объекта и переходного процесса: τ/T0=100/600=0.17; tрег/τ=3000/100=30. Передаточная функция объекта будет иметь вид:
3. Выбор типового регулятора АСР и определение параметров его настройки для заданного технологического параметраВ любой АСР управляющее воздействие на объект регулирования формируется автоматическим регулятором в соответствии с принятым алгоритмом регулирования и требуемым качествам АСР. Необходимым условием надежной устойчивой работы АСР является правильный выбор типа регулятора и его настроек, гарантирующий требуемое качество регулирования. Существует множество методик выбора регулятора. Воспользуемся методикой, основанной на анализе вида передаточной функции объекта регулирования. В зависимости от свойств объектов управления, определяемых его передаточной функцией и параметрами, и предполагаемого вида переходного процесса выбирается тип и настройка линейных регуляторов. Согласно данной методике при выборе типа регулятора сначала определяемся с видом переходного процесса, который хотят получить. Апериодический (без перерегулирования), когда требуется исключить влияние регулирующего воздействия на другие переменные объекта. С 20% -ным перерегулированием, при котором обеспечивается малое время переходного процесса. С минимальной интегральной квадратичной оценкой, при которой обеспечивается наименьшее значение суммарного динамического отклонения (компромисс между быстродействием и устойчивостью системы). Требуемое качество регулирования в процессе эксплуатации АСР, кроме безусловного требования устойчивости, определяется следующими критериями: минимальное время регулирования, отсутствие перерегулирования и др. Выбор того или иного критерия оптимальности определяется технологическими требованиями к системе регулирования и является одной из первых задач по выбору типового регулятора. С экономической и в ряде случаев с технологической точки зрения наиболее целесообразно применять в качестве критерия оптимальности минимальную интегральную квадратичную оценку, так как реализация такого критерия почти всегда приводит к минимальным потерям при регулировании и к минимальным динамическим ошибкам. Однако, если параметры системы недостаточно точно известны или если они изменяются, то наличие в системе, настроенной по данному критерию, продолжительных колебаний может привести к неустойчивой работе регулятора или резонансным явлениям. Наибольшим запасом по устойчивости обладают системы, настроенные по критерию с минимальным временем регулирования и без перерегулирования. Когда требуется исключить влияние регулирующего воздействия данной системы на другие величины сложного объекта, целесообразно, чтобы переходный процесс имел апериодический характер. Вторым этапом по выбору регулятора является определение типа (закона) регулятора. Существуют различные таблицы, графики, номограммы по выбору регулятора, зависящие от динамических свойств объекта, относительной нагрузки, характера ее изменения, заданных показателей качества регулирования. Основные области применения линейных регуляторов определяются с учетом следующих рекомендаций: И-регулятор со статическим ОР - при медленных изменениях возмущений и малом времени запаздывания (τ/То< 0,1); П-регулятор со статическим и астатическим ОР - при любой инертности и времени запаздывания, определяемые соотношением τ/То ≤ 0,1; ПИ-регулятор при любой инертности и времени запаздывания ОР, определяемом соотношением τ/То ≤ 1; ПД и ПИД - регуляторы при условии τ/То ≤ 1 и малой колебательности переходных процессов. Учитывая то, что передаточная функция у меня имеет вид:
и τ/То = 0,17 можно сделать вывод, что в нашем случае (контур регулирования температурного режима обжига цементного клинкера) подходящим является ПИ-регулятор. Если при дальнейших расчетах окажется, что ПИ-регулятор не удовлетворяет заданным условиям, нам необходимо выбрать более сложный (и следовательно, более дорогой) ПИД-регулятор, который имеет лучшие показатели регулирования. 3.1 Определение параметров настройки ПИ - регулятораДля определения параметров настройки ПИ - регулятора используем пакет прикладных программ для построения нелинейных систем управления Signal Constant, который реализует метод динамической оптимизации. Этот инструмент, строго говоря, представляющий собой набор блоков, разработанных для использования с Simulink, автоматически настраивает параметры моделируемых систем, основываясь на определённых пользователем ограничениях на их временные характеристики. Типовой сеанс работы в среде Simulink с Использованием возможностей и блоков Signal Constant состоит из ряда стадий, описанных ниже. В среде Simulink создается модель исследуемой динамической системы (в общем случае нелинейной). Входы блоков Signal Constant соединяются с теми сигналами системы, на которые накладываются ограничения. Этими сигналами могут быть, например, выходы системы, их среднеквадратические отклонения и т.д. В режиме командной строки МАТLAB
задаются начальные значения параметров подлежащих оптимизации, Двойным щелчком на пиктограмме Signal Constant данные блоки "раскрываются". При помощи мыши нужным образом изменяются конфигурации и размеры областей ограничений для нужных сигналов системы. |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||