|
Курсовая работа: Расчет редуктора точного прибораВинтовые механизмы используют для передачи малых мощностей (например, кинематических цепях приборов и т. д.) благодаря бесшумному зацеплению колес, скрещивающихся под любым углом. Начальной поверхностью передач является средняя часть гиперболоида. Для упрощения изготовления колес гиперболоиды заменяют цилиндрами. Такая замена начальных поверхностей делает первоначальный контакт (в ненагруженном состоянии) точечным, а колеса — косозубыми цилиндрическими. Геометрический расчет винтовых передач производится так же, как и расчет косозубых передач. В отличие от косозубых эвольвентных передач углы β1 и β2 наклона зубьев могут быть неодинаковыми; в ортогональной винтовой передаче β1+ β2 = 900. Заданное передаточное отношение можно обеспечить изменением диаметров колес и углов наклона зубьев. В гипоидных передачах начальной поверхностью является расширяющаяся часть гиперболоида. Для упрощения изготовления колес этих передач гиперболоиды заменяют усеченными конусами. В результате передача вращения осуществляется коническими колесами с прямыми или криволинейными зубьями. Но вершины конусов колес не пересекаются, они скрещиваются обычно под углом 90°. Начальный контакт прямозубых колес точечный; колеса с криволинейными зубьями могут иметь контакт по линии. Работа винтовых и гипоидных передач характеризуется точечным контактом зубьев и их большим взаимным скольжением (особенно в винтовых передачах), вследствие чего ухудшаются условия смазывания, возникает повышенный износ и часто наступает заедание (особенно в гипоидных передачах). Для увеличения износостойкости зубьев винтовых передач их колеса изготовляют из материалов с хорошими антифрикционными свойствами. Обычно пары колес составляют из материалов: сталь — бронза, сталь — чугун, сталь — текстолит и др. Для предотвращения заедания гипоидные колеса изготовляют из сталей с высокой твердостью поверхности, применяют также противозадирные смазочные материалы (гипоидное масло и др.). Червячную передачу образуют два колеса: ведущее колесо (червяк) выполнено с малым числом зубьев z1 = 1...4, а ведомое (червячное) колесо имеет большое число зубьев z2≥ 28. Угол скрещивания осей обычно составляет 90°. По форме делительной поверхности различают червяки: цилиндрические и глобоидные. Цилиндрические червяки (ГОСТ 18498—73) могут иметь в осевом сечении трапецеидальный или выпуклый профиль, а в торцовом сечении архимедову спираль (архимедов червяк), удлиненную (реже укороченную) эвольвенту; конволютный червяк) и эвольвенту (эвольвентный червяк). Их нагрузочная способность приблизительно одинаковая. Архимедов червяк может быть нарезан на обычных токарных и резьбофрезерных станках (не требует специальных станков), однако шлифование (доводка после термообработки) его затруднено. Поэтому архимедовы червяки применяют в передачах, если твердость червяка в пределах до 350НВ приемлема (в открытых и малонагруженных закрытых передачах). Эвольвентные червяки используют в высоконагруженных передачах, в которых требуется высокая твердость (свыше 45НRС) и допускается малая высота микронеровностей. Червячные передачи обладают рядом достоинств: возможностью получения больших передаточных отношений в одной ступени (обычно i=10...60, реже i= 60...100), плавностью и бесшумностью работы, самоторможением. Однако червячные передачи имеют сравнительно низкий КПД, обусловленный большим скольжением и тепловыделением, часто требуют для отвода теплоты применения специальных устройств (обдув, оребрение корпуса и др.). Указанные обстоятельства ограничивают области использования червячных передач. Ниже рассматриваются лишь червячные передачи, так как среди гиперболоидных передач они наиболее широко используются в технике. ЦЕПНЫЕ ПЕРЕДАЧИ Цепной называют передачу зацеплением с помощью цепи. Их используют в приводах для передачи на большое расстояние вращательного движения (между параллельными осями) с преобразованием его параметров. Простейшая передача включает в себя две звездочки, соединенные приводной цепью. Одна из звездочек будет ведущей, другая — ведомой. Линия центров передачи может быть не только горизонтальной, но и наклоненной к горизонту под углом γ≤80°. Применяют также передачи с приводом нескольких ведомых звездочек от одной ведущей. Цепные передачи используют в приводах роботов, сельскохозяйственных и транспортных машин, различных станков и т. п. в качестве быстроходной (скорость цепи Vц ≤ 25 м/с, передаточное отношение i≤З) или тихоходной (скорость цепи Vц<2 м/с, i=10...15) ступени. Среднескоростные передачи при Vц = 2...6 м/с допускают i≤6. Цепные передачи используют в качестве понижающих или повышающих. Передаваемая мощность обычно не превышает 100 кВт, межосевое расстояние до 6...8 м. Цепные передачи имеют высокий КПД (η = 0,96...0,98), меньшую, чем в ременной передаче, нагрузку на валы, в них исключено проскальзывание цепи. Недостатки передачи обусловлены шумом, неравномерностью хода «вытягиванием» цепей (увеличением шага цепей вследствие износа шарниров) и, как следствие, необходимостью применения натяжных устройств. ПЕРЕДАЧИ ВИНТ-ГАЙКА Передача винт — гайка представляет собой кинематическую винтовую пару, которую используют в различных машинах и приборах для преобразования с большой плавностью и точностью хода вращательного движения в поступательное. Механизмы часто применяют в качестве подъемных (домкраты и др.) и нагружающих устройств (прессы и др.), так как с их помощью можно сравнительно просто получать большие усилия (500...1000 кН) при малых перемещениях. Простейший механизм содержит два звена: стойку - неподвижную гайку и подвижное звено — винт, обладающее винтовым движением. Механизм используют на практике для создания силы. В механизмах оба звена, составляющих винтовую пару, подвижны. В первом из них вращение гайки вызывает поступательное перемещение винта, а во втором — вращение винта приводит к поступательному перемещению гайки. Эти две схемы передач распространены на практике, так как передача вращательного движения на гайку или винт не вызывает технических трудностей. Используют механизмы с резьбой различных профилей. В силовых механизмах большее распространение получила трапецеидальная резьба, в механизмах приборов — метрическая резьба, а в механизмах и устройствах прессов и прокатных станов - упорная резьба. Достоинства механизмов: простота конструкций, плавность и точность хода, большое передаточное отношение, а также возможность самоторможения. Однако их КПД сравнительно низкий. Ходовые винты изготовляют из высокоуглеродистых сталей 40, 45, 50, 40ХН, 50ХГ, 65Г и др. с закалкой до твердости более 50 НRС. Гайки изготовляют из оловянистых бронз Бр010Ф1, Бр06Ц6С3 и др. при высоких скоростях вращения (0,1...0,25 м/с), а при малых скоростях вращения используют антифрикционные чугуны марок АВЧ-1, АВЧ-2, АКЧ-1, АКЧ-2 или серые чугуны марок СЧ15, СЧ20. ВЫВОД: Наиболее применима и удобна зубчатая передача с эвольвентным зацеплением. На основании данного материала самой хорошей передачей является цилиндрическая с эвольвентным зацеплением. 3. Под кинематической схемой понимается изображение перечня элементов и изображение между ними 3.1 Определение общего придаточного отношения Uр=nвх/nвых, где nвх–число оборотов входного вала, nвых– число оборотов выходного вала Подставляя исходные данные получим: Uр=2052/38=54 3.2. Определение числа ступеней Для обеспечения минимальной массы оптимальное число ступеней: К=3lgUр Подставляя данные получим: К=3·lg 54 ≈ 5 Для определения ориентировочного передаточного отношения каждой ступени воспользуемся формулой: Uк= Uк= Для нормальной работы редуктора необходимо, чтобы передаточное отношение ступеней возрастало от входного вала к выходному. При этом числовое значение Uк должно лежать в пределах от 1/5 до 5. Ориентируясь на полученную цифру для первой ступени выбираем: U1=1,8, т.к.Uр = U1·U2·U3·U4·U5 U2,3,4,5 = Up/U1 = 54/1,8 = 30 U2 = 2 U3,4,5 = U2,3,4,5/U2 = 30/2 = 15 U3 = 2,2 U4,5 = U3,4,5/U3 = 15/2,2 =6,8 U4 = 2,4 U5 = U4,5/U4= 6,8/2,4 = 2,8 U1=1,8 U2 = 2 U3 = 2,2 U4 = 2,4 U5 = 2,8 3.3 Определение числа зубьев Минимальное число зубьев на шестерни для эвольвентного зацепления лежит в пределах от 17 до 28, причем в точных передачах надо приближаться к верхнему правому пределу. Ориентируясь на ГОСТ 13733-77 выбираю для первой шестерни Z1 = 24 Для обеспечения технологичности и экономичности редуктора рекомендуется все шестерни делать одинаково. Поэтому Z1 = Z3= Z5 = Z7= Z9= 24 Определим число зубьев шестерни Uк = Z2i/Z2i-1 U1 = Z2/Z1 Z2 = U1·Z1 = 1,8·24 ≈ 43 Z4 = U2·Z3 = 2·24 = 48 Z6 = U3·Z5 = 2,2·24 ≈ 53 Z8 = U4·Z7 = 2,4·25 ≈58 Z10 = U5·Z9 = 2,8·24 ≈ 67 Полученные результаты сведём в таблицу 1.
Определим общее передаточное отношение редуктора по ГОСТу Uрг = Z2·Z4·Z6·Z8·Z10/ Z1·Z3·Z5·Z7·Z9 Определим погрешность придаточного отношения:
т.е. число зубьев колёс выбрано правильно. С учетом полученных данных строим кинематическую схему редуктора. 4. Расчет кинематики и геометрии Основой для проведения расчетов является выбранный модуль и число зубьев колес. 4.1 Расчет кинематики редуктора Расчет ведем по следующим формулам: Uk= n2k-1/n2k= W2k-1/W2k Wk= Tihk/30 Mk+1= Mk·Uk M2= M1·U1= 25·10-4·1,8= 0,0045 M3= M2·U2= 0,0045·2= 0,009 M4= M3·U3= 0,009·2,2= 0,0198 M5= M4·U4= 0,0198·2,4= 0,04752 M6= M5·U5= 0,04752·2,8= 0,133056 n1=2052 n2= n1/U1= 2052/1,8= 1140 n3= n2/U2= 1140/2= 570 n4= n3/U3= 570/2,2= 259 n5= n4/U4= 259/2,4= 108 n6=n5/U5= 108/2,8= 38 Wk= Tihk/30≈0,1 W1= n1·Wk= 2052·0,1= 205,2 W2= n2·Wk= 1140·0,1= 114,0 W3= n3·Wk= 570·0,1= 57,0 W4= n4·Wk= 259·0,1= 25,9 W5= n5·Wk= 108·0,1= 10,8 W6= n6·Wk= 38·0,1= 3,8 Полученные данные занесем в таблицу 2
4.2 Геометрия Воспользуемся следующими формулами: d= mz – для делительной окружности De= d+2m – диаметр выступа Db= d-3m – диаметр впадины a= m(z1+z2+…)/2 – межцентровое расстояние, z1– шестерня, z2– колесо b= (3…15)m – ширина венца h= 2,5m – высота зуба Предварительно выбираем значение модуля по Госту 9563–60 m= 0,3 Определим делительные окружности: d1,3,5,7,9= mz1= 0,3·24= 7,2 d2= mz2= 0,3·43= 12,9 d4= mz4= 0,3·49= 14,7 d6= mz6= 0,3·54= 16,2 d8= mz8= 0,3·55= 16,5 d10= mz10= 0,3·68= 20,4 Определим диаметр выступа: De1,3,5,7,9= d1,3,5,7,9+2m= 7,2+0,6= 7,8 De2= d2+2m= 12,9+0,6= 13,5 De4= d4+2m= 14,7+0,6= 15,3 De6= d6+2m= 16,2+0,6= 16,8 De8= d8+2m= 16,5+0,6= 17,1 De10= d10+2m= 20,4+0,6= 21 Определим диаметр впадины: Db1,3,5,7,9= d1,3,5,7,9-3m= 7,2-0,9= 6,3 Db2= d2-3m= 12,9-0,9= 12,0 Db4= d4-3m= 14,7-0,9= 13,8 Db6= d6-3m= 16,2-0,9= 15,3 Db8= d8-3m= 16,5-0,9= 15,6 Db10= d10-3m= 20,4-0,9= 19,5 Определить межцентровое расстояние: a1= m(z1+z2)/2= 0,3(24+43)/2= 10,05 a2= m(z1+z2)/2= 0,3(24+49)/2= 10,95 a3= m(z1+z2)/2= 0,3(24+54)/2= 11,7 a4= m(z1+z2)/2= 0,3(24+55)/2= 11,85 a5= m(z1+z2)/2= 0,3(24+68)/2= 13,8 Определим ширину венца: b= (3…15)m= 10·0,3= 3 Определим высоту зуба: h= 2,5m= 2,5·0,3= 0,75 5. Разработка конструкций редуктора Разработка конструкции состоит в расчете и выборе его элементов: зубчатые колеса, валы, подшипники и корпуса. ОБЩАЯ ХАРАКТЕРИСТИКА ВАЛОВ И ОСЕЙ Назначение и классификация. Поддержания вращающихся деталей для передачи вращающего момента одной детали к другой (в осевом направлении) в конструкциях используют детали в форме тел вращения, называемые валами. В зависимости от вида испытываемой деформациусловно различают: простые валы (валы) — работают в условиях кручения, изгиба и растяжения (сжатия), их применяют в передачах: зубчатых, ременных и др.; торсионные валы (торсионы) — работают лишь в условиях кручения, т. е. передают только вращающий момент, соединяя обычно два вала на индивидуальных опорах; оси — поддерживающие невращающиеся валы, работающие лишь в условиях изгиба и реже растяжения (сжатия.). В зависимости от распределения нагрузок вдоль оси вала и условий сборки прямые валы выполняют гладкими или ступенчатыми, близкими по форме к балкам равного сопротивления изгибу. Гладкие валы более технологичны. В специальных машинах (поршневых двигателях и компрессорах) используют коленчатые валы, имеющие «ломаную» ось. Для передачи вращающего момента (вращения) между агрегатами со смещенными в пространстве осями входного и выходного валов применяют специальные гибкие валы, имеющие криволинейную геометрическую ось при работе. Такие валы обладают высокой жесткостью при кручении и малой жесткостью при изгибе. В зависимости от расположения, быстроходности и назначения валы называю входными, промежуточными, выходными, тихо - или быстроходными, распределительными и т. п. 5.1 Выбор конструкции цилиндрических зубчатых колес Конструкция определяется ГОСТом 13755-81 Для улучшения работоспособности
тяжелонагруженных и высокоскоростных цилиндрических зубчатых передач- внешнего
зацеплений рекомендуется применять исходный контур с модификацией профиля
головки зуба, при этом линия модификации — прямая, коэффициент высоты
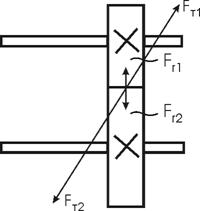
модификации hg должен быть не более 0,45, а коэффициент глубины модификации Параметры модификации .профиля головки зуба исходного контура приведены в справочном приложении. Для передач, к которым предъявляются специальные требования, допускается применение исходных контуров, отличающихся от установленных настоящим стандартом, параметры которых должны устанавливаться в отраслевых стандартах. Допускается изготавливать зубчатые колеса винтовых передач в соответствии с исходным -контуром, установленным настоящим стандартом. Зубчатые колеса рекомендуется изготавливать без модификации профиля головки зуба, если в результате модификации головки величина части коэффициента торцевого перекрытия, определяемая участками главных профилен ε ам, скажется менее 1,1 у прямозубых передач. Зубчатые колеса передач внутреннего зацепления могут изготавливаться в соответствии с исходным контуром. При окончательной обработке боковых поверхностей зубьев зубообрабатывающим инструментом следует с практически возможным приближением обеспечивать параметры модификации и переходные кривые, при этом действительная высота модификации головки зуба должна быть не более номинальной. В технически обоснованных случаях, при массовом и крупносерийном производстве и для передач точнее 6-й степени точности рекомендуется изменение параметров модификации применительно к частным условиям работы передачи. 5.2 Конструктивное выполнение и использование валов dв [ dв1 dв2 dв3 dв4 dв5 dв6 5.3 Выбор и расчет опор ОПОРЫ ВАЛОВ И ОСЕЙ ОБЩАЯ ХАРАКТЕРИСТИКА ПОДШИПНИКОВ СКОЛЬЖЕНИЯ Общие сведения. Подшипник скольжения является парой вращения, он состоит из опорного участка вала (цапфы) и собственно подшипника котором. Их используют в качестве опор валов и осей механизмов и машин в тех случаях, когда применение подшипников качения затруднено или невозможно по ряду причин: высокие вибрационные и ударные нагрузки; низкие и особо высокие частоты вращения; работа в воде, агрессивных средах, а также при недостаточном смазывании или без смазывания; необходимость выполнения диаметрального разъема; отсутствие подшипников качения требуемых диаметров (миниатюрные и особо крупные валы) и др. Надежность работы подшипников в значительной мере определяет работоспособность и долговечность машин. Благодаря бесшумности и указанным выше достоинствам, а также по конструктивным и экономическим соображениям опоры скольжения находят широкое применение в паровых и газовых турбинах, двигателях внутреннего сгорания, центробежных насосах, центрифугах, металлообрабатывающих станках, прокатных станах, тяжелых редукторах и пр. По виду трения скольжения различают: подшипники сухого трения — работают на твердых смазочных материалах без смазочного материала; подшипники граничного (полужидкостного) трения; подшипники жидкостного трения подшипники с газовой смазкой. По виду воспринимаемой нагрузки и подшипники подразделяю на- радиальные — воспринимают радиальную нагрузку упорные — воспринимают осевые силы радиально-упорные — воспринимают радиальные и осевые нагрузки; обычно их функции выполняют упорные подшипники, совмещенные с радиальными. Цапфу, передающую радиальную нагрузку, называют шагом — при расположении ее в конце вала и шейкой — если она находится в середине вала. Цапфу, передающую осевую нагрузку, называют пятой, а подшипник подпятником. Форма рабочей поверхности подшипников и цапф может быть цилиндрической, конической и шаровой. Конические и шаровые подшипники применяются редко. Самое главное требование- малое трение При выборе шарикоподшипников исходят из усилия, возникающие при зацеплении зубчатых колес. При выборе шарикоподшипников исходят из усилий, возникающих при зацеплении зубчатых колес. Для цилиндрической передачи это усилие:
где Радиальная сила направлена к центру зубчатого колеса. Подшипники выбираются в зависимости от действующих нагрузок, так как здесь действует радиальная сила. Выбор ведется по внутреннему диаметру подшипника ГОСТ 8338 – 75: получаем, что первому валу соответствует подшипник 1000091, второму валу – 1000091/1,5, третьему – 1000092, четвертому – 1000093. Правильность выбора подшипника определяется по его динамической грузоподъемности. Для этого используется следующая формула:
где С - динамическая грузоподъемность, n – число оборотов, Р – эквивалентная динамическая нагрузка. А Р, в свою очередь, вычисляется по формуле:
где Х – коэффициент нагрузки, V – коэффициент вращения, Кб – коэффициент безопасности, КТ – температурный коэффициент. Для прямозубых цилиндрических передач: Х = V = Кб = КТ =1,
Вычислим окружное усилие, радиальное усилие, грузоподъемность и результаты запишем в таблицу 3
Ft= 2Mкр/d – окружное усилие Ft1= 2*0,0025/0,001= 5 Ft2 2*0,0045/0,001= 9 Ft3 2*0,009/0,0015= 12 Ft4 2*0,0198/0,002= 19,8 Ft5 2*0,04752/0,0025= 38,016 Ft6 2*0,133056/0,003= 88,704 F F F F F F F Для прямозубых цилиндрических передач: X=V= Kб= Kt=1 C=F L=104 час C C1=1,82 C2=3,28 C3=4,37 C4=7,21 C5=13,84 C6=32,29 5.4 Определение КПД ηр=η1·η2·η3·η4·η5 ηi=1-cπf(1/z1+1/z2)*1/2 f=0,15 c= (F c1=(1,82+2,87)/(1,82+0,17)= 2,36 c2=(3,28+2,87)/(3,28+0,17)=1,78 c3=(4,37+2,87)/(4,37+0,17)=1,59 c4=(7,21+2,87)/(7,21+0,17)=1,37 c5=(13,84+2,87)/(13,84+0,17)=1,19 η1=1-1,82*3,14*0,15(1/24+1/43)*1/2= 0,96 η2=1-1,78*3,14*0,15(1/24+1/49)*1/2= 0,97 η3=1-1,59*3,14*0,15(1/24+1/54)*1/2= 0,97 η4=1-1,37*3,14*0,15(1/24+1/55)*1/2= 0,98 η5=1-1,19*3,14*0,15(1/24+1/68)*1/2= 0,98 ηр=η1·η2·η3·η4·η5 ηр=0,96·0,97·0,97·0,98·0,98= 0,87=87% Заключение При проектировании редуктора находят практические приложения такие важнейшие сведения из курса, как расчеты на контактную и объемную прочность, тепловые расчеты, выбор материалов и термообработок, масел, посадок, параметров шероховатости поверхности и т. д. При выборе типов передач, вида зацепления, механических характеристик материалов надо учитывать, что затраты на материалы составляют значительную часть стоимости машин: в редукторах общего назначения -85 %, в дорожных машинах — 75 %, в автомобилях — 70 % и т. д. Таким образом, изыскание путей снижения массы проектируемых объектов является важнейшей предпосылкой дальнейшего прогресса, необходимым условием сбережения природных ресурсов. Уместно отметить, что большая часть вырабатываемой в настоящее время энергии проходит через механические передачи, поэтому их КПД в известной степени определяет эксплуатационные расходы. Наиболее полно требованиям снижения массы и габаритных размеров удовлетворяет привод с использованием планетарных передач. Этому виду передач посвящено большое внимание. Список используемой литературы: 1. “Прикладная механика” авторы: Г.Б.Иосилевич, Г.Б.Строганов 2. П.Д.Дунаев, О.П.Леликов ”Конструирование узлов и деталей машин” 3. В.Н.Кудрявцева ”Курсовое проектирование деталей машин” |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Страницы: 1, 2
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 - окружное усилие
- окружное усилие - долговечность в часах
- долговечность в часах - грузоподъемность,
- грузоподъемность,