|
Курсовая работа: Проектирование и исследование механизмов двухцилиндрового ДВСКурсовая работа: Проектирование и исследование механизмов двухцилиндрового ДВСКафедра «Теории механизмов и машин» РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОЙ РАБОТЕ НА ТЕМУ: «Проектирование и исследование механизмов 2-х цилиндрового ДВС» 2010 г. Содержание рычажный механизм кинематический силовой Техническое задание Введение 1. Определение закона движения механизма при установившемся режиме работы 1.1 Структурный анализ 1.2 Построение кинематической схемы и планов возможных скоростей 1.3 Приведение сил и масс. Определение размеров маховика 1.4 Определение скорости и ускорения начального звена 2. Кинематический и силовой анализ рычажного механизма для заданного положения 2.1 Определение скоростей методом построения планов скоростей 2.2 Определение ускорений методом построения планов ускорений 2.3 Определение векторов сил инерции и главных моментов сил инерции звеньев 2.4 Силовой расчет диады 2-3 2.5 Силовой расчет диады 4-5 2.6 Силовой расчет механизма 1ого класса 2.7 Определение уравновешивающей силы с помощью теоремы Н.Е. Жуковского о «жестком рычаге» Список использованной литературы Техническое задание Вариант 00. 1. Определить закон движения рычажного механизма при установившемся режиме работы. 2. Выполнить кинематический и силовой анализ рычажного механизма для заданного положения.
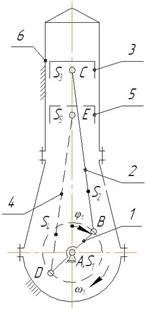
Рис. 1 Исходные данные: Длина звена 1: lAB=lAD=l1=0,1 м; длина звеньев 2 и 4: l2=l4=0,38 м; относительное положение центра массы S шатуна: BS2/BC=DS4/DE=0,38; угловая средняя скорость звена 1: ω1ср=75 рад/с; масса звеньев 2 и 4: m2=m4=15 кг; масса звеньев 3 и 5: m3=m5=12 кг; момент инерции звеньев 2 и 4 относительно центра масс: JS2=JS4=0,22 кг∙м2; момент инерции кривошипного вала относительно оси вращения: JA1=1,25 кг∙м2; момент инерции вращающихся звеньев редукторов, приведенный к оси кривошипного вала: JР=1,9 кг∙м2; момент инерции гребного вала с винтом: Jв=4 кг∙м2; диаметр цилиндра: D=0,12 м; допускаемый коэффициент неравномерности вращения кривошипного вала: δ=1/40; координата звена 1 для силового анализа: φ1=30°. Введение Данная курсовая работа выполнена по предмету: «Теория механизмов и машин» и состоит из двух разделов. В первом разделе определяется закон движения рычажного механизма при установившемся режиме работы; во втором разделе проводится кинематический и силовой анализы рычажного механизма для заданного положения. В этой работе рассматривается кривошипно-ползунный механизм, который является основным механизмом в двигателях внутреннего сгорания. Курсовая работа состоит из пояснительной записки и двух чертежей формата А1 и А2. В пояснительной записке приводится описание заданного рычажного механизма, структурный, кинематический и силовой анализы. На чертежах построена кинематическая схема механизма для двенадцати равноотстающих положений кривошипа, планы скоростей и ускорений для заданного положения механизма, планы сил для заданного положения механизма и схема рычага Жуковского. 1. Определение закона движения механизма при установившемся режиме работы1.1 Структурный анализМеханизм представляет собой 6-тизвенный рычажный механизм. Кинематическая схема механизма показана на рис. 1: звено 1 – ведущее – кривошип BD равномерно вращается вокруг неподвижной оси; звено 2 – шатун ВC совершает плоскопараллельное движение; звено 3 – ползун (поршень) C движется поступательно; звено 4 – шатун DE совершает плоскопараллельное движение; звено 5 – ползун (поршень) E движется поступательно; звено 6 – стойка неподвижная (неподвижный шарнир A; неподвижные направляющие ползуна E; неподвижные направляющие ползуна С). Кинематические пары – подвижные соединения двух звеньев, сведены в таблицу 1.1. Таблица 1.1.
Кинематических пар IV класса в данном механизме нет. В результате: - число кинематических пар V класса р5 = 7; - число кинематических пар IV класса р4 = 0. Степень подвижности механизма W определяется по формуле Чебышева: W = 3n – 2p5 – p4, где n – число подвижных звеньев, p5 – число кинематических пар V класса, p4 – число кинематических пар IV класса. Получаем: W = 3·5 – 2·7 – 0 = 1, т.е. механизм имеет одно ведущее звено – кривошип BD. Рычажный механизм состоит из механизма 1-го класса и двухповодковых групп. 1. Диада 4-5 (рис. 1) – шатун DE с ползуном E – представляет собой двухповодковую группу второго вида, т.е. диаду с двумя вращательными и одной поступательной (конечной) парами. Число подвижных звеньев n = 2. Число кинематических пар с учетом незадействованной, но учитываемой при определении степени подвижности диады: р5 = 3; р4 = 0. Степень подвижности диады: W45 = 3·2 - 2·3 – 0 = 0 2. Диада 2-3 (рис. 1) – шатун BC с ползуном C представляет собой двухповодковую группу второго вида, т.е. диаду с двумя вращательными и одной поступательной (конечной) парами. Число подвижных звеньев n = 2. Число кинематических пар с учетом незадействованной, но учитываемой при определении степени подвижности диады: р5 = 3; р4 = 0. Степень подвижности диады 2-3: W23 = 3·2 - 2·3 – 0 = 0 3. Механизм 1-го класса (рис. 1) – ведущее звено 1 (кривошип BD), соединенное шарниром A с неподвижной стойкой 6. Число подвижных звеньев n = 1. Кинематические пары в точках B и D учтены в диадах 4-5 и 2-3. Число кинематических пар: р5 = 1; р4 = 0. Степень подвижности механизма 1-го класса: W1 = 3·1 - 2·1 – 0 = 1 1.2 Построение кинематической схемы и планов возможных скоростейОпределяем недостающий размер механизма – ход поршня. Для кривошипно-ползунного механизма без эксцентриситета ход поршня: Н = 2l1 = 2∙0,1 = 0,2 м. Строим кинематическую схему механизма для двенадцати равноотстающих положений кривошипа в масштабе μl = 0,002 м/мм. Крайнее верхнее положение т. В кривошипа, соответствующее верхнему мертвому положению поршня 3, принимается за исходное и ему присваивается номер «0». Планы возможных скоростей для двенадцати положений механизма строятся на основании векторных уравнений:
и условия, что направления скоростей точек С и Е совпадают с осью цилиндров.
Построение планов начнем, задавшись длиной векторов VB = VD = 50 мм, одинаковой для всех положений механизма. 1.3 Приведение сил и масс. Определение размеров маховикаОпределим момент инерции маховика и его размеры по методу Мерцалова, используя теорему об изменении кинетической энергии и делая предварительно приведение сил и масс к начальному (первому) звену механизма. Построим индикаторную диаграмму в масштабе:
где Рmax – максимальное давление в цилиндре, МПа; рmax – максимальная ордината индикаторной диаграммы в мм. Внешние силы и моменты, действующие на звенья механизма: силы давления газов на поршни: Рд3 и Рд5; силы тяжести звеньев: G2 = G4 = gm2 = 10·15 = 150 H; G3 = G5 = gm3 = 10·12 = 120 H, приведенный момент сопротивления МСпр = const, величина которого пока неизвестна. Максимальное усилие на поршень: Рдmax = F·Pmax = (πD2/4)· Pmax = (3,14·0,122/4)· 5,14·106 = 56,5 кН Для удобства использования индикаторную диаграмму преобразуем в график сил Рд3(Sc). За ординаты графика сил принимаются ординаты, снимаемые с индикаторной диаграммы, тогда масштаб графика сил определится по формуле: µр’ = µр·F·106 = µр·(πD2/4)·106 = 0,056·(3,14·0,122/4)·106 = 0,63 кН/мм Определим, из условия равенства элементарных работ (мощностей) приведенного момента и приводимых сил, приведенный момент от сил давления газов и сил тяжести звеньев для группы Ассура II22(2,3)(цилиндр С):
Для первого положения механизма:
Расчеты показывают, что влияние сил веса звеньев на значение приведенного момента незначительно ( <<2%) и им можно пренебречь. Учитывая также, что угол между вектором силы и вектором скорости точки приложения этой силы всегда равен 0° или 180°, расчетная формула для определения приведенного момента сил, действующих на группу Ассура II22(2,3), окончательно запишется:
Выполним расчет Приведенный момент инерции
Для первого положения механизма:
= 0,2482 кг/м2 Выполним расчет По результатам табличных расчетов строим графики:
Масштаб графика µφ = 2π/х = 6,28/300 = 0,0209 рад/мм. Аналогично для графика µφ = 2π/х = 6,28/300 = 0,0209 рад/мм. Таблица 1
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||