|
Курсовая работа: Термодинамические основы термоупругостиСледовательно, уравнение (1.3.23) описывает распространение двух
видов волн расширения, из которых один, связанный с На основании уравнений (1.3.20) и (1.3.21) общее решение уравнения (1.3.19) можно представить в виде
где
Таким образом, в рассматриваемом случае общее решение связанной термоупругой задачи на основании представления (1.3.18) и решения (1.3.25) принимает вид
Учитывая, что
и принимая во внимание формулу (1.328), получаем на основании соотношения (1.2.2) следующие выражения для напряжений:
ρ — плотность среды, в которой распространяется волна (1.3.26) Задача термоупругости, описываемая двумя уравнениями:
называется несвязанной динамической задачей термоупругости, или просто динамической задачей термоупругости. При существенном приращении температуры Т—Т0 коэффициенты
Вместо этих трех скалярных уравнений можно записать одно векторное в виде
где grad μ · Пε — скалярное произведение тензора деформации Пε на вектор grad μ. Если учесть зависимость 2 Модель термоупругой среды 2.1 Понятие модели сплошной среды: простые и сложные Дифференциальные уравнения и соотношения, выражающие законы сохранения массы, импульса, энергии и второй закон термодинамики нужны для общего случая независимо от того, какими конкретными физико-механическими свойствами обладает деформируемая среда, и в силу этого имеют универсальный характер, т.е. справедливы для любых сред. Однако при попытке математического описания движения какой-либо конкретной деформируемой среды (газообразной, жидкой или твердой) довольно легко установить, что имеющихся в распоряжении универсальных дифференциальных уравнений и соотношений не достаточно для составления замкнутой системы уравнений, которая могла бы послужить основой для последующего нахождения единственного решения и получения количественной информации о характере движения и изменения состояния деформируемой среды. При этом очевидна закономерность: количество входящих в составляемую систему уравнений неизвестных величин (характеристических функций) на 6 единиц больше имеющихся в распоряжении уравнений, где 6 — количество независимых компонент симметричных тензоров напряжений и деформаций. Например, приведенная ниже система уравнений адиабатического движения деформируемой среды включает 20 уравнений (одно уравнение неразрывности (2.1.1), три уравнения движения (2.1.2), одно уравнение энергии (2.1.3), три кинематических соотношения взаимосвязи компонент скорости и перемещения (2.1.4), шесть геометрических соотношений (2.1.5) и шесть кинематических соотношений (2.1.6) и 26 неизвестных характеристических функций (плотность, удельная внутренняя энергия, по три компоненты векторов перемещения и скорости, по шесть независимых компонент симметричных тензоров напряжений, деформаций и скоростей деформаций) [53]:
Анализ приведенной системы уравнений показывает, что в ней отсутствуют соотношения, учитывающие реакцию деформируемой среды на процесс деформирования и показывающие, какие внутренние напряжения возникают в ней в ответ на деформации. Подобные соотношения в самом общем виде можно записать как
Соотношения вида (2.1.7) называются физическими соотношениями, они определяют специфику той или иной деформируемой среды в отношении оказания сопротивления деформированию и тесно связаны с понятием модели сплошной среды. Модель сплошной среды — это некоторое идеализированное представление реальной деформируемой среды, учитывающее основные ее свойства сопротивления деформированию и подчиняющееся определенному математическому описанию в виде физических соотношений (2.1.7). Выбор модели сплошной среды для реальной деформируемой среды и соответствующий выбор физических соотношений (2.1.7) позволяет составить замкнутую систему дифференциальных (2.1.1)—(2.1.6) и конечных функциональных (2.1.7) уравнений для математического описания движения и внутреннего состояния исследуемой среды. Под простыми моделями сплошных сред понимаются идеализированные представления реальных деформируемых сред, учитывающие какое-либо одно из основных механических свойств. К числу простых относятся следующие четыре модели: модель идеальной среды (идеальная жидкость или идеальный газ, не способные оказывать сопротивление формоизменению); модель вязкой жидкости (учитывается лишь свойство вязкости); модель упругой среды (принимается во внимание лишь проявление свойства упругости); модель жесткопластической среды (проявляется только свойство пластичности). Рассмотрим перечисленные выше простые модели сплошных сред, придерживаясь следующей последовательности: определение модели, общие соображения относительно сопротивления деформированию данной среды, определяющие уравнения, физические соотношения, примеры использования данной модели при физико-математическом моделировании и ее термодинамические особенности. Упругая (идеально, или совершенно, упругая) среда — это изотропная сплошная среда, сдвиговое и объемное сопротивления которой линейно зависят от деформаций. В качестве определяющих уравнений для модели упругой среды выступают уравнения, устанавливаемые на основе опытных данных по деформированию твердых тел (металлов и их сплавов, пластмасс и т.п.) при малых деформациях. Этим же обстоятельством определяется область практического использования данной модели сплошной среды. Так, из экспериментов по всестороннему сжатию твердых тел при малых объемных деформациях устанавливается прямо пропорциональная зависимость среднего напряжения от средней деформации, выражаемая уравнением Бриджмена (2.1.8) и определяющая физическое поведение упругой среды.
В более общем случае, с учетом влияния температуры, физическое поведение упругой среды описывается уравнением Дюамеля — Неймана:
К — модуль объемного сжатия;
Т и Уравнение Дюамеля — Неймана может быть представлено в более
"прозрачном" для понимания виде: Вто же время из экспериментов по кручению тонкостенных металлических труб, в индивидуальных частицах среды реализуется напряженно-деформированное состояние чистого сдвига, устанавливается прямо пропорциональная зависимость касательных напряжений от сдвиговых деформаций, приводящая к выводу о существовании следующей взаимосвязи между девиаторами напряжений деформаций:
где G – модуль упругости второго рода (модуль сдвига). Уравнение (3.21) принимается в качестве определяющего механическое поведение упругой среды. Из уравнения (3.21) следует скалярное определяющее уравнение — прямо пропорциональная зависимость интенсивности напряжений от интенсивности деформаций:
Из определяющих уравнений (3.12)(или (3.20)) и (3.21) следуют
физические соотношения для моделей упругой среды,принимающие форму обобщенного закона Гука.
Компоненты девиатора напряжений (см. (3.21)) могут быть выражены через
компоненты девиатора деформаций как
Обратные физические соотношения (зависимости компонент тензора деформаций от компонент тензора напряжений) получаются аналогичным образам и имеют вид
Обобщенный закон Гука описывает все частные проявления упругого
поведения деформируемых сред, реализующиеся в простых случаях
напряженно-деформированного состояния. Так, для деформированного состояния
чистого сдвига (ε12
где Е = 18KG/(6K + 2G) — модуль упругости первого рода (модуль Юнга), a v = (ЗК - 2G)/(6K + 2G) — коэффициент Пуассона. Модуль Юнга Е и коэффициент Пуассона v в дополнение к модулю сдвига G и модулю объемного сжатия К являются еще одной парой упругих характеристик, через которые может быть представлен обобщенный закон Гука. Выражая модуль объемного сжатия и модуль сдвига через модуль Юнга и коэффициент Пуассона как
можно получить запись физических соотношений для моделей упругой среды в форме
Следует отметить, что имеющаяся взаимосвязь между парами упругих характеристик (2.1.14) позволяет ограничиться экспериментальным определением лишь двух из них с последующим расчетом двух других. Наиболее просто определяются из опытов значения модуля Юнга Е (одноосное растяжение образцов) и модуля сдвига G (кручение образцов с реализацией напряженно-деформированного состояния чистого сдвига). Уравнения (2.1.8), (2.1.10) и (2.1.13) позволяют истолковать
физический смысл упругих характеристик G, E, v, К. Как следует из
(2.1.10), модуль сдвига G определяет касательные напряжения, возникающие в упругой
среде при чистом сдвиге. В соответствии с (2.1.13) модуль Юнга Е определяет
продольные деформации, возникающие при одноосном растяжении, а коэффициент
Пуассона v
— соотношение поперечной и продольной деформаций в этом же случае. Согласно
уравнению Бриджмена (2.1.8), модуль объемного сжатия К определяет среднее
напряжение в зависимости от объемной деформации в и, напротив, характеризует
объемную деформацию, возникающую в частицах упругой среды, когда в них
существует давление р = — σ: Важным частным случаем модели упругой среды является так
называемая несжимаемая упругая среда, объем индивидуальных частиц, которой не
изменяется при любом уровне давления (или среднего напряжения). Для такой среды
Термодинамические особенности модели упругой среды определяются
тем обстоятельством, что процесс адиабатического деформирования ее частиц
является обратимым и в случае снятия нагрузок сопровождается самопроизвольным
протеканием в обратном направлении с уменьшением до нуля напряжений и
деформаций и возвратом в исходное состояние. Для такой среды отсутствует переход
механической работы деформации во внутреннюю тепловую энергию (χ = 0),
энтропия индивидуальных частиц может изменяться только за счет теплообмена с
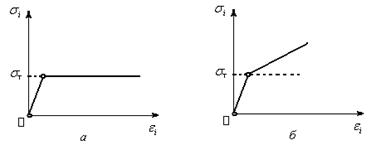
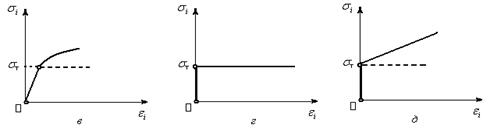
окружающими частицами: Под сложными моделями сплошных сред понимаются модели, в которых учитываются два и более основных механических свойства. К числу таких моделей относятся, например, упругопластическая, вязкоупругая, вязкопластическая, упруговязкопластическая среды. В этом разделе рассматривается одна из сложных моделей — модель упругопластической среды, наиболее широко используемая при математическом моделировании процессов деформирования твердых тел. Модель упругопластической среды соответствует твердым телам (главным образом, металлам и их сплавам), которые при нагружении работают упруго, пока не выполняется некоторое предельное условие, называемое условием пластичности, а при дальнейшем нагружении такой среды в ней развиваются не только упругие, но и пластические деформации. Для реальных упругопластических сред характерны диаграммы
механического поведения (диаграммы деформирования)
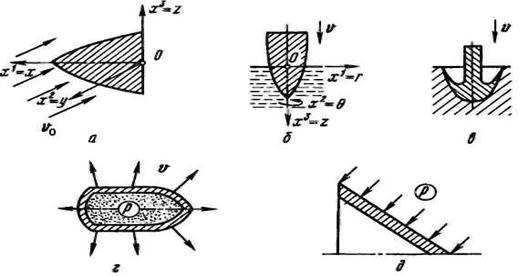
Рисунок 1 Возможными вариантами упрощенных диаграмм механического поведения являются диаграммы идеальной жесткопластической среды (рис.1,г) или жесткопластической среды с упрочнением (рис. 1, д), причем для двух последних случаев характерно отсутствие упругого участка (упругими деформациями по сравнению с пластическими пренебрегают). Модель упругопластической среды является сложной не только по формальному признаку (принимаются во внимание свойства упругости и пластичности), но и с точки зрения уровня сложности математического описания. Отметим, что в случае малых деформаций (превышающих упругие, но соизмеримых с ними) модель упругопластической среды хорошо описывается деформационной теорией пластичности (теория малых упругопластических деформаций). При больших (конечных) деформациях для описания поведения упругопластических сред более предпочтительна теория пластического течения. 2.2 Постановка задач в механики сплошных сред Прикладное значение механики сплошных сред заключается в том, что она создает фундамент для физико-математического моделирования процессов взаимодействия деформируемых тел и сред. С помощью формулируемых в механике сплошных сред уравнений и соотношений удается составить замкнутую систему уравнений, решение которых позволяет исследовать поведение деформируемых сред и получать информацию о параметрах их движения и состояния. В настоящее время именно физико-математическое моделирование с позиций механики сплошных сред является наиболее мощным инструментом расчетно-теоретического исследования функционирования различных технических объектов, как существующих, так и проектируемых. В качестве примеров прикладных задач, необходимость решения которых возникает при изучении функционирования газодинамических импульсных устройств, можно указать задачи обтекания тел вращения воздушным потоком (рис. 2, а), проникания тел вращения в плотные и прочные среды (рис. 2, б, в), метания металлических облицовок продуктами детонации взрывчатого вещества (рис. 2, г), схлопывания конических металлических облицовок под действием приложенного давления с формированием кумулятивной струи (рис. 2, д) и т.п. Однако решению задачи обязательно предшествует весьма важный этап формализации рассматриваемого физического процесса: его описание в виде соответствующей системы
Рисунок 2 уравнений, соотношений и определенных условий, т.е. решению задачи предшествует так называемая постановка задачи или же формулировка физико-математической модели изучаемого процесса взаимодействия деформируемых тел или сред. Далее приведем общие принципы постановки задач механики сплошных сред с различными физико-механическими свойствами и последовательно проанализируем особенности постановки задач механики идеальной и вязкой жидкостей, упругой и упругопластической сред. При этом основное внимание уделим этапам составления замкнутой системы исходных уравнений, получению системы разрешающих уравнений и различных частных ее видов, особенностям задания граничных условий. Постановку задачи механики упругопластической среды рассмотрим в полном объеме на примере процесса проникания металлического тела в металлическую преграду. Постановка задачи механики сплошных сред заключается в составлении
такой замкнутой системы уравнений и соотношений, которая бы описывала движения
и состояние деформируемых сред с учетом их физико–механических свойств,
действия внешних сил, тепловых и других факторов и позволяла определять
зависимости характеризующих движение и состояние физических величин от
координат и времени Постановка любой задачи механики сплошных сред включает следующие пять этапов: — выбор системы отсчета и системы координат, по отношению к которым будет описываться движение материального континуума; — выбор моделей сплошных сред для участвующих в исследуемом процессе реальных деформируемых сред; — составление системы исходных уравнений для выбранных моделей и исследуемого процесса; — выбор основных неизвестных характеристических функций и переход к так называемой системе разрешающих уравнений; — формулировка начальных и граничных условий для решаемой задачи. 2.2.1 Выбор системы отсчета и системы координат. В большинстве случаев при постановке прикладных задач выбираются инерциальные системы отсчета, неподвижные относительно земной поверхности. Как известно, выбор такой системы отсчета позволяет использовать при математическом описании движения законы механики Ньютона, в частности уравнение движения (2.1.2), являющееся выражением второго закона Ньютона применительно к сплошным деформируемым средам. Например, для показанного (на рис. 2, б) случая проникания тела вращения в плотную среду в качестве точки отсчета удобно принять неподвижную относительно Земли точку 0 начала взаимодействия проникающего тела с плотной средой. В некоторых более редких случаях допустимо и более удобно использование неинерциальных систем отсчета. Например, при решении задачи расчета характеристик напряженно-деформированного состояния проникающего тела — оболочки вращения — и оценке его прочности удобнее связать систему отсчета с самим тормозящимся в процессе проникания телом. Однако в этом случае в соответствии с принципом Даламбера следует включить в число внешних сил объемные силы инерции, для чего необходимо предварительное определение ускорения проникающего тела. Выбор конкретного вида системы координат |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 (1.3.25)
(1.3.25) grad
grad 
 (1.3.29)
(1.3.29) (1.3.31)
(1.3.31)
 (2.1.11)
(2.1.11) .
.