Курсовая работа: Проектирование асинхронного двигателя
(58)
(60)
А.
4.2 Магнитное напряжение
зубцовой зоны статора , А
, (61)
где мм;
Расчетная индукция в
зубцах, Тл
(62)
Тл
где >1,8 Тл., необходимо
учесть ответвление потока в паз и найти действительную индукцию в зубце . Коэффициент по высоте
А.
Действительная индукция , Тл
, (63)
где - коэффициент,
определяющий отношение площадей поперечных сечений паза и зубца;
(64)
, (65)
Принимаем Тл, проверяем соотношение и : ; где для Тл по табл. П1.7 А/м
4.3 Магнитное напряжение
зубцовой зоны ротора , А
; (66)
А.
При зубцах по рис. 9.40,
б из табл. 9.20 мм; индукция в
зубце
; (66)
Тл.
По табл. П.1.7 для Тл находим А/м
4.4 Коэффициент насыщения
зубцовой зоны
(67)
4.5 Магнитное напряжение
ярма статора
, (68)
Где
; (69)
м;
; (70)
м;
А;
; (71)
Тл.
При отсутствии радиальных
вентиляционных каналов в статоре м),
для Тл по табл. П1.6 находим А/м
4.6 Магнитное напряжение
ярма ротора, А
, (72)
Где
; (73)
м;
; (74)
м;
А;
; (75)
Тл,
где для четырехполюсных
машин при 0,75 <
; (76)
м,
где для Тл по табл. П1.6 находим А/м.
4.7 Магнитное напряжение
на пару полюсов , А
, (77)
А.
4.8 Коэффициент насыщения
магнитной цепи
(78),
4.9 Намагничивающий ток , А
, (79)
А
Относительное значение
; (80)
; 0,2<<0,3.
5. ПАРАМЕТРЫ РАБОЧЕГО
РЕЖИМА
5.1 Активное
сопротивление обмотки статора
, (81)
где для класса
нагревостайкости изоляции расчетная
температура С; для медных проводников Ом·м); площадь поперечного
сечения эффективного проводника, м2; L1 – общая длина эффективных проводников фазы обмотки, м;
Ом.
Длина проводников фазы
обмотки
; (82)
м;
; (83)
м;
м;
, (84)
где м; по табл. 9.23 ;
м;
; (85)
м.
Длина вылета лобовой
части катушки
, (86)
где по табл. 9.23
мм.
Относительное значение
; (87)
.
5.2 Активное
сопротивление фазы алюминиевой обмотки ротора
; (88)
Ом;
, (89)
где ;
где Ом·м удельное
сопротивление алюминия;
Ом;
; (90)
Ом;
Приводим к числу витков обмотки
статора
, (91)
где ;
Ом;
Относительное значение
; (92)
.
5.3 Индутивное
сопротивление фазы обмотки статора
; (93)
Ом,
Где
, (94)
(95)
мм
мм
(96)
мм;
, так как проводники закреплены
пазовой крышкой; ; ; м;
;
; (97)
;
; (98)
; (99)
;
.
Относительное значение
; (100)
.
5.4 Индуктивное
сопротивление фазы обмотки ротора
, (101)
где
; (102)
; (103)
мм;
мм; мм;
мм; мм; мм2;
;
; (104)
;
; (105)
; (106) ; (107)
;
Ом
так как при закрытых
пазах .
Приводим к числу витков статора
; (108)
Ом.
Относительное значение
(109)
.
6. РАСЧЁТ ПОТЕРЬ
6.1 Потери в стали
основные.
, (110)
где [ для стали 2013 по табл. 9.28]
; (111)
кг;
; (112)
кг;
;
;
Вт.
6.2 Поверхностные потери
в роторе.
, (113)
Где
; (114)
Вт/м2;
; ; (115)
Тл;
Для
;
;
Вт.
6.3 Пульсационные потери
в зубцах ротора.
, (116)
Где
; (117)
Тл;
Тл; ;
; (118)
кг;
;
;
Вт.
6.4 Сумма добавочных
потерь в стали
, (119)
где ;
Вт.
6.5 Полные потери в стали
; (120)
Вт.
6.6 Механические потери
; (121)
Вт.
6.7 Холостой ход
двигателя
, (122)
где ; (123)
; (124)
Вт;
А;
А;
; (125)
.
7. РАСЧЁТ РАБОЧИХ ХАРАКТЕРИСТИК
ДВИГАТЕЛЯ
7.1 Параметры:
Сопротивление , Ом
(126)
Ом
Сопротивление , Ом
(127)
Ом
(128)
(129)
Активная составляющая
тока синхронного холостого тока , А
(130)
А
(131)
Ом
(132)
Ом
Потери, не изменяющиеся
при изменении скольжения, кВт
кВт
7.2 Рассчитываем рабочие
характеристики для различных скольжений s = 0,005; 0,01; 0,015; 0,02; 0,025; 0,03. Результаты расчета
сведены в таблицу 1.
Данные спроектированного
двигателя:
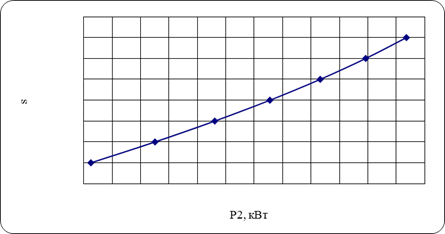
Графики рабочих
характеристик спроектированного двигателя с короткозамкнутым ротором изображены
на рисунках 3, 4, 5, .
Таблица 1 – Рабочие
характеристики асинхронного двигателя
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое.

 (60)
(60)
 (62)
(62) ; (93)
; (93) , (94)
, (94) ; (99)
; (99) ;
; ; (106)
; (106)  , (116)
, (116)