|
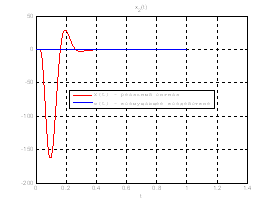
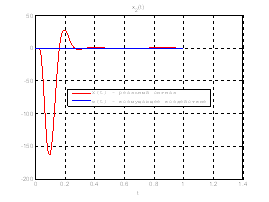
Курсовая работа: Математическая модель в пространстве состояний линейного стационарного объекта управленияРис.32. Графики коэффициентов регулятора обратной и прямой связи.
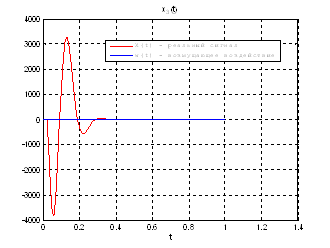
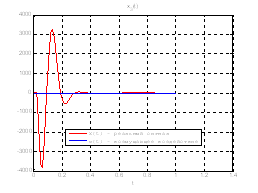
Рис.33. График возмущающего воздействия.
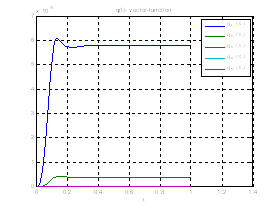
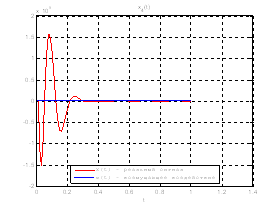
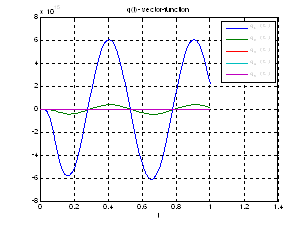
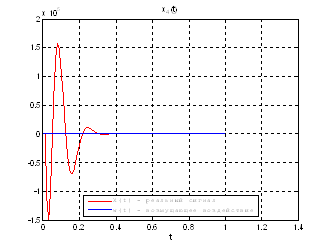
Рис.34. График вспомогательной вектор – функции.
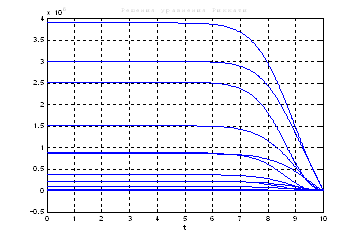
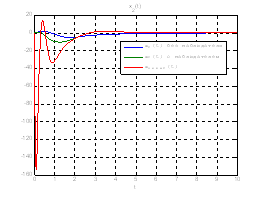
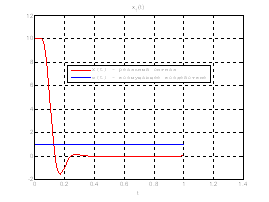
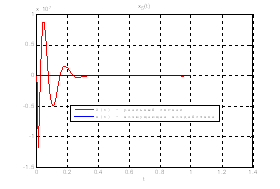
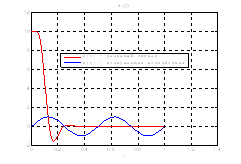
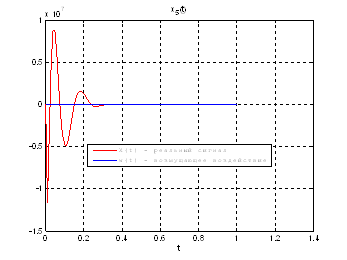
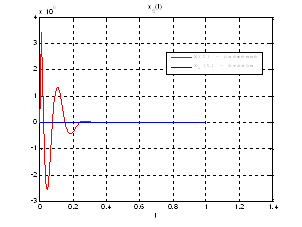
Рис.35. Графики фазовых координат.
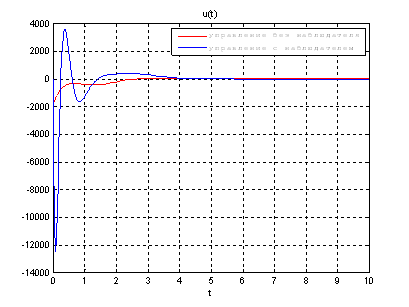
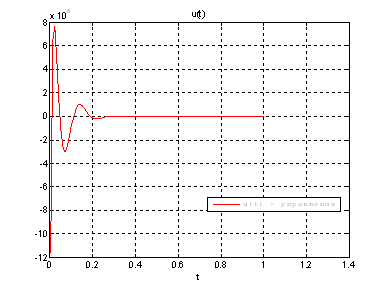
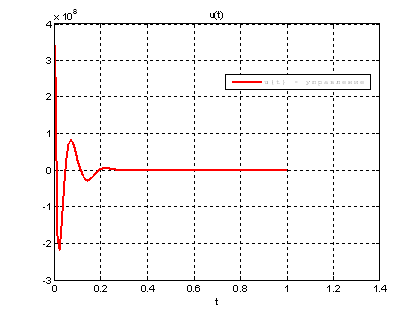
Рис.36. График управления.
Рис.37. График возмущающего воздействия.
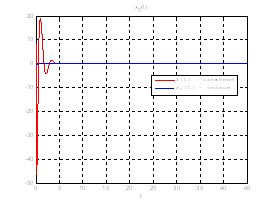
Рис.38. График вспомогательной вектор – функции.
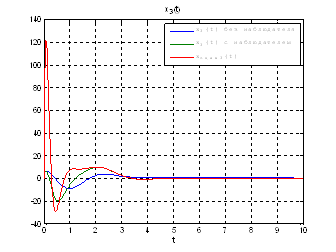
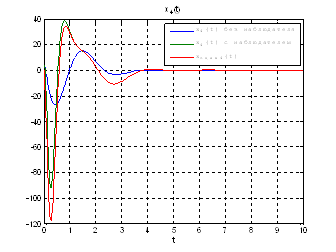
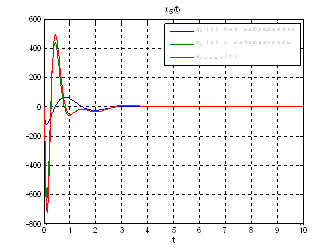
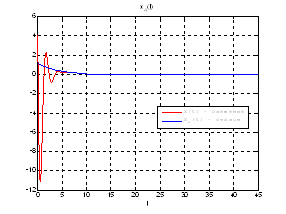
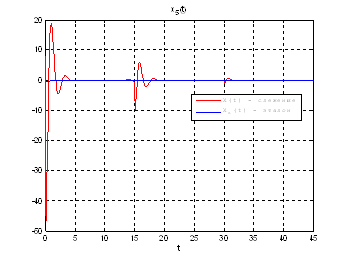
Рис.39. Графики фазовых координат.
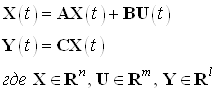
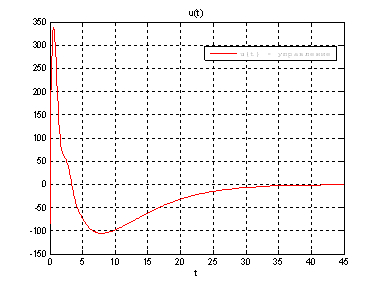
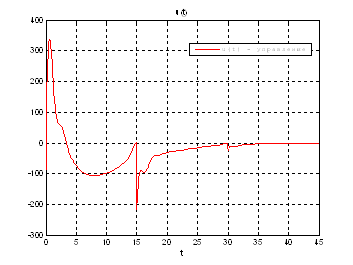
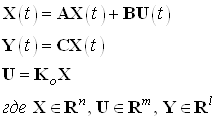
Рис.40. График управления. Выводы: По графикам фазовых координат при различных воздействиях видно, что влияние возмущающего воздействия не существенно и фазовые координаты устанавливаются в ноль. При этом видно, что графики первой фазовой координаты при различных воздействиях мало отличаются друг от друга, т.е. система отрабатывает любое возмущение. 5.4 Задача АКОР для отслеживания известного задающего воздействия. I подходСистема задана в виде:
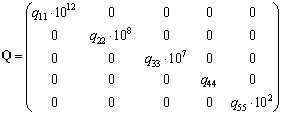
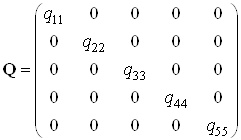
Матрицы Весовые матрицы
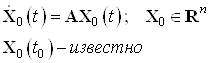
Начальные условия для заданной
системы Время слежения Задающее воздействие в виде системы ДУ
Начальные условия для воздействия:
Введем расширенный вектор
состояния и расширенные матрицы
Тогда новое описание системы имеет вид:
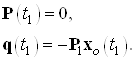
с начальными условиями: Решением уравнения Риккати будет матрица:
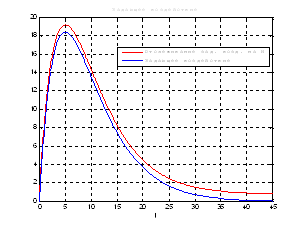
с н.у. Тогда оптимальное управление, находится по формуле:
Используя скрипт AKOR_slegenie_na_konech_interval_I_podxod, получили следующие результаты:
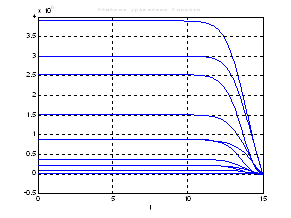
Рис.41. Графики решения уравнения Риккати.
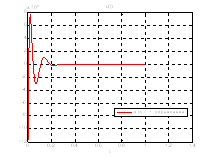
Рис.42. Графики коэффициентов регулятора обратной и прямой связи.
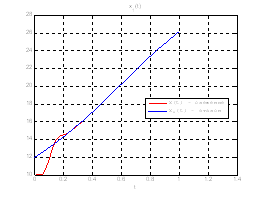
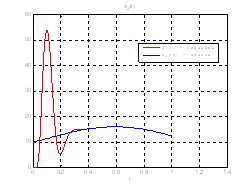
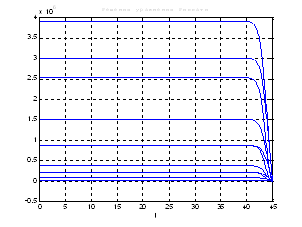
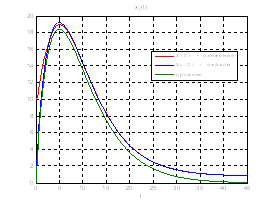
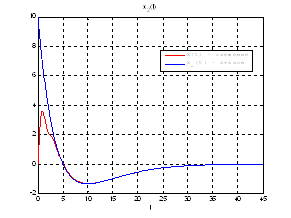
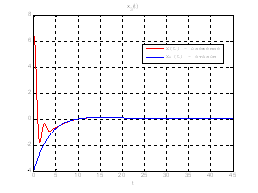
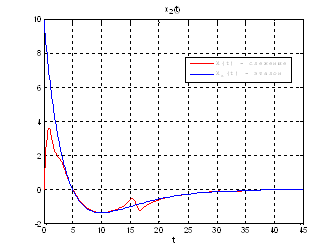
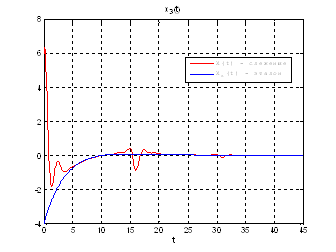
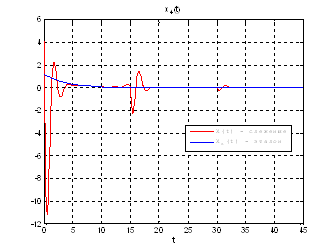
Рис.43. Графики фазовых координат.
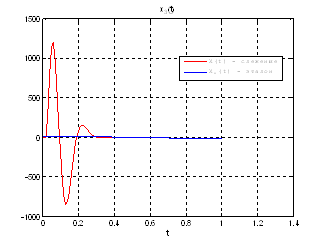
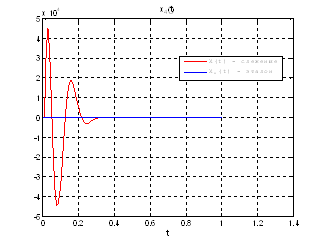
Рис.44. График управления. Выводы: На данном этапе была решена задача АКОР-слежения. В качестве отслеживаемого воздействия была взята исходная система, но с другими начальными условиями, поэтому графики фазовых координат отличаются от заданных, но только на начальном участке движения. 5.5 Задача АКОР для отслеживания известного задающего воздействия. II подход (линейный сервомеханизм)Система задана в виде:
Матрицы Весовые матрицы
Начальные условия для заданной
системы Задающее воздействие имеет вид:
Время слежения Введём вспомогательную
вектор-функцию
НУ определяются из соотношения
Зная закон изменения
Используя скрипт AKOR_slegenie_na_konech_interval_II_podxod, получили следующие результаты:
Рис.45. Графики решения уравнения Риккати.
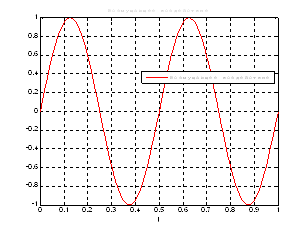
Рис.46. График задающего воздействия.
Рис.47. Графики коэффициентов регулятора обратной и прямой связи.
Рис.48. Графики фазовых координат.
Рис.49. График управления. Выводы: На данном этапе была решена задача построения линейного сервомеханизма. В качестве отслеживаемого воздействия была задана экспоненциальная функция. Анализируя выше приведенные графики, можно сказать, что все состояния заданной системы, особенно первая фазовая координата, отслеживается с заданной точностью. 5.6 Задача АКОР – слежения со скользящими интерваламиПусть интервал времени Разобьем весь интервал на 3 равных отрезка. Данная задача похожа на задачу отслеживания известного задающего воздействия, заданного аналитическим выражением, но с некоторыми изменениями: 1. Поскольку в уравнение Риккати
относительно матрицы
2. Начальными условиями для системы на каждом отрезке будет точка, в которую пришла система на предыдущем отрезке:
3. Вектор 4. В остальном данная задача аналогична задаче построения линейного сервомеханизма (пункт 5.5). Используя скрипт AKOR_slegenie_so_skolz_intervalami_Modern, получили следующие результаты:
Рис.50. Графики решения уравнения Риккати.
Рис.51. Графики фазовых координат.
Рис.52. График управления. Выводы: при сравнении полученных результатов, можно сказать, что различия в фазовых координатах при наличии трех участков и при наличии одного участка несущественные. Если сравнивать скорость вычислений и используемые ресурсы, то скорость увеличивается почти в 3 раза, а памяти требуется в 3 раза меньше для решения поставленной задачи. В точках соединения участков наблюдаются скачки, связанные с тем, что требуется значительные затраты на управление, но для первой координаты этот скачок незначительный. 6. Синтез наблюдателя полного порядка Наблюдателями называются
динамические устройства, которые позволяют по известному входному и выходному
сигналу системы управления получить оценку вектора состояния. Причем ошибка
восстановления Система задана в виде:
Начальные условия для заданной
системы Матрицы Весовые матрицы
Построим наблюдатель
полного порядка и получим значения наблюдаемых координат
В качестве начальных условий для наблюдателя выберем нулевые н.у.:
Ранг матрицы наблюдаемости:
наблюдаемости.
Т. е. система является наблюдаемой. Коэффициенты регулятора:
тогда
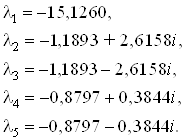
Собственные значения
матрицы
Коэффициенты наблюдателя
выберем из условия того, чтобы наблюдатель был устойчивым, и ближайший к началу
координат корень матрицы Коэффициенты матрицы наблюдателя:
Используя скрипт Sintez_nablyud_polnogo_poryadka, получили следующие результаты:
Рис.53. Графики решения уравнения Риккати.
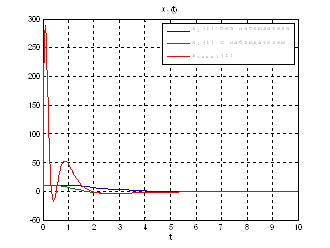
Рис.54. Графики фазовых координат.
Рис.55. Графики управлений. Выводы: Так как система является полностью
наблюдаема и полностью управляема, то спектр матрицы 1. Методы классической и современной теории автоматического управления: Учебник в 5 – и т. Т.4: Теория оптимизации систем автоматического управления / Под ред. Н.Д. Егупова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2004. – 748 с. 2. Краснощёченко В.И.: Методическое пособие: «Методы теории оптимального управления». PlotTimeFrHaract.mclc clear all close all b1 = 9; b0 = 5;
a4 = 0.1153; a3 = 1.78; a2 = 3.92; a1 = 14.42; a0 = 8.583;
% syms s w % W_s_chislit = b1 * s + b0; % W_s_znamen = s * (a4 * s^4 + a3 * s^3 + a2 * s^2 + a1 * s + a0); % % W_s_obj = W_s_chislit/W_s_znamen;
%A_w = collect(simplify(abs(subs(W_s_obj, s, i*w))))
%----------------------Построение АЧХ-------------------------------------% figure('Name', '[0,10]'); w = 0 : 0.01 : 10; A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2)); plot(w,A_w,'k', 'LineWidth', 2); grid on xlabel('w') ylabel('A(w)') title('Function ACHX(w)') %-------------------------------------------------------------------------%
r_ch = roots([b1 b0]) r_zn = roots([a4 a3 a2 a1 a0 0])
%----------------------Построение ФЧХ-------------------------------------% figure('Name', '[0,100]'); w = 0 : 0.01 : 100; fi_w = (atan(w/0.5556)-atan(w/0)-atan(w/13.5832)-atan((w-2.7677)/0.5850)... -atan((w+2.7677)/0.5850) - atan(w/(0.6848)))*180/pi; plot(w,fi_w, 'k', 'LineWidth', 2); grid on xlabel('w') ylabel('fi(w)') title('Function FCHX(w)') %-------------------------------------------------------------------------%
%----------------------Построение АФЧХ------------------------------------% figure('Name', '[0,100]'); w = 0 : 0.01 : 100; A_w = sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2)); fi_w = (atan(w/0.5556)-atan(w/0)-atan(w/13.5832)-atan((w-2.7677)/0.5850)... -atan((w+2.7677)/0.5850) - atan(w/(0.6848))); polar(fi_w,A_w, 'k'); grid on xlabel('Re(W(jw))') ylabel('Im(W(jw))') title('Function AFCHX(fi_w,A_w)') %-------------------------------------------------------------------------%
%----------------------Построение ЛАЧХ------------------------------------% figure('Name', '[0,100]'); w = -100 : 0.01 : 100; LA_w = 20*log(sqrt((b0^2 + b1^2.*w.^2)./((-a1*w.^2+a3*w.^4).^2+(a0*w-a2*w.^3+a4*w.^5).^2))); plot(w,LA_w,'k', 'LineWidth', 2); grid on xlabel('w') ylabel('L(w)') title('Function L(w)') %-------------------------------------------------------------------------%
%----------------------Построение ФАЧХ------------------------------------% %-------------------------------------------------------------------------%
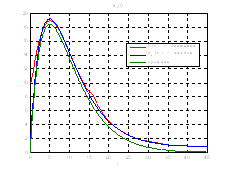
%----------------------Построение h(t)------------------------------------% figure('Name', '[0,50]'); t = 0 : 0.01 : 50; h_t = 0.0024 * exp(-13.5832.*t) - 0.2175 * exp(-0.6848.*t)... + 0.1452 * exp(-0.5850.*t).* cos(2.7677.*t)... - 0.2217 * exp(-0.5850.*t).* sin(2.7677.*t)... + 0.5825 .* t + 0.0699; plot(t,h_t, 'k', 'LineWidth', 2); grid on xlabel('t') ylabel('h(t)') title('Function h(t)') %-------------------------------------------------------------------------%
%----------------------Построение k(t)------------------------------------% figure('Name', '[0,50]'); t = 0 : 0.01 : 50; k_t = - 0.0329 * exp(-13.5832.*t) + 0.1489 * exp(-0.6848.*t)... - 0.6986 * exp(-0.5850.*t).* cos(2.7677.*t)... - 0.2721 * exp(-0.5850.*t).* sin(2.7677.*t)... + 0.5826; plot(t,k_t, 'k', 'LineWidth', 2); grid on xlabel('t') ylabel('k(t)') title('Function k(t)') %-------------------------------------------------------------------------%
x1=tf([b1 b0],[a4 a3 a2 a1 a0 0]); ltiview(x1) ProstranstvoSostoyanii.mclc clear all
%format rational
b1 = 9; b0 = 5;
a5 = 0.1153; a4 = 1.78; a3 = 3.92; a2 = 14.42; a1 = 8.583; a0 = 0;
%1. Матрица Фробениуса A=[0 1 0 0 0; 0 0 1 0 0; 0 0 0 1 0; 0 0 0 0 1; 0 -a1/a5 -a2/a5 -a3/a5 -a4/a5]
B=[0; 0; 0; 0; 1/a5]
C=[b0 b1 0 0 0] %Проверка syms s W_s = collect(simplify(C*(s.*eye(5)-A)^(-1)*B),s) pretty(W_s)
%2. Параллельная декомпозиция b1 = b1/a5; b0 = b0/a5;
s1 = 0; s2 = -6615/487; s3 = -1022/1747 + 4016/1451*i; s4 = -1022/1747 - 4016/1451*i; s5 = -415/606;
alfa = real(s3); beta = imag(s3);
syms s A B C D E
W_s_etal = collect(((b1*s+b0)/((s-s1)*(s-s2)*((s+alfa)^2+beta^2)*(s-s5))),s) %pretty(W_s_etal)
Slag_1 = simplify(collect(A*(s-s2)*((s+alfa)^2+beta^2)*(s-s5),s)); Slag_2 = simplify(collect(B*(s-s1)*((s+alfa)^2+beta^2)*(s-s5),s)); Slag_3 = simplify(collect(C*(s-s1)*((s+alfa)^2+beta^2)*(s-s2),s)); Slag_4 = simplify(collect((D*s+E)*(s-s1)*(s-s2)*(s-s5),s));
Chislit_W_s =collect(Slag_1 + Slag_2 + Slag_3 + Slag_4,s);
%Решение системы линейных уравнений
MS =double( [1 1 1 1 0; 6753029497/515578134 -513659/1058682 10560977/850789 4210795/295122 1; 77456808434995506239663107/126764366837761533378822144 1874500571398143988939141/260296441145300889894912 -3300780600401725219142291/418364246989311991349248 915075/98374 4210795/295122; 26189071674868424275768861465/253528733675523066757644288 2853037197681682345182805/520592882290601779789824 45476725452203201718998205/418364246989311991349248 0 915075/98374; 6290947020888109571128085025/84509577891841022252548096 0 0 0 0])
PCH = [0; 0; 0; b1; b0];
Koeff = MS^(-1)*PCH
%Проверка MS*[Koeff(1);Koeff(2);Koeff(3);Koeff(4);Koeff(5)];
Slag_1 = simplify(collect(Koeff(1)*(s-s2)*((s+alfa)^2+beta^2)*(s-s5),s)); Slag_2 = simplify(collect(Koeff(2)*(s-s1)*((s+alfa)^2+beta^2)*(s-s5),s)); Slag_3 = simplify(collect(Koeff(3)*(s-s1)*((s+alfa)^2+beta^2)*(s-s2),s)); Slag_4 = simplify(collect((Koeff(4)*s+Koeff(5))*(s-s1)*(s-s2)*(s-s5),s));
Chislit_W_s =collect((Slag_1 + Slag_2 + Slag_3 + Slag_4),s); Znamena_W_s = collect((s-s1)*(s-s2)*((s+alfa)^2+beta^2)*(s-s5),s);
W_s = collect(simplify(Koeff(1)/(s-s1)+Koeff(2)/(s-s2)+(Koeff(4)*s+Koeff(5))/((s+alfa)^2+beta^2)+Koeff(3)/(s-s5)),s) pretty(W_s) %Расчет матриц состояния A = [s1 0 0 0 0; 0 s2 0 0 0 ; 0 0 0 1 0; 0 0 -(alfa^2+beta^2) -2*alfa 0; 0 0 0 0 s5]
B = [Koeff(1); Koeff(2); 0; 1; Koeff(3)]
C = [1 1 Koeff(5) Koeff(4) 1]
%Проверка W_s = collect(simplify(C*(s.*eye(5)-A)^(-1)*B),s) pretty(W_s)
%ВСЕ ПОДСЧИТАНО ВЕРНО!!! SimplexMetod2.mfunction SimplexMetod2 clc clear all close all format short
% Матрицы системы A = [0 2; -3 0];
B = [0; 2];
% Координаты начальной и конечной точки X_0 = [14; 0]; X_N = [0; 0];
% Ограничение на управление u_m = -3; u_p = 5;
eps = 1e-10;% погрешность сравнения с нулем N = 195;% число шагов %h = t1/N;% шаг дискретизации h = 0.0162; alfa = 1; a = 0; b = 0;
%t1 = 796/245;% время перехода в конечное состояние n = size(A); n = n(1);% порядок системы
% Нахождение матричного экспоненциала syms s t MatrEx = ilaplace((s*eye(n)-A)^(-1)); MatrEx_B = MatrEx*B;
% Вычисление матриц F и G F = subs(MatrEx, t, h); G = double(int(MatrEx_B, t, 0, h));
ФОРМИРОВАНИЕ ЗАДАЧИ БЫСТРОДЕЙСТВИЯ КАК ЗАДАЧИ ЛИНЕЙНОГО ПРОГРАММИРОВАНИЯ
for index = 1 : 1e+10
% Вычисление правой части PravChast = X_N - F^N * X_0;
% Вычисление произведения F на G FG = zeros(n, N);% формирование матрицы для хранения данных |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 ,
, 
 ,
, ,
, .
. .
.
 ,
, 
 ,
, 
 .
.