|
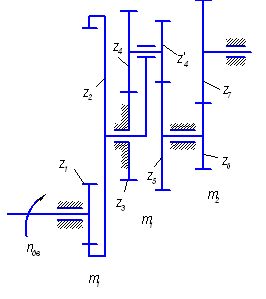
Курсовая работа: Проектирование и исследование механизмов поршневого насосакинематическая схема привода представлена на рис. 5.
Рис. 5 Привод машины состоит из
двух пар зубчатых колес с неподвижными осями и планетарной передачи. Определим
передаточное отношение планетарной передачи Передаточное отношение от водила к 5-му колесу определяется по формуле
Методом подбора разбиваем передаточное число следующим образом
4.2 Расчет внешнего неравносмещенного зацепления с прямыми зубьями Заданы следующие величины: модуль зацепления m = 5,5 мм. угол исходного профиля рейки α = 20º; коэффициент высоты
головки зуба исходного профиля коэффициент радиального
зазора число зубьев шестерни Z6 = 12; число зубьев колеса Z7 = 18; межосевое расстояние aw = 85 мм. Порядок проведения расчета. Делительные диаметры
Основные диаметры
Окружные делительный и основной шаги
Угол зацепления
αw = arccos 0,91206 = 24,208° = 24° 12' 30". Суммарный коэффициент смещения
По блокирующему контуру [4, фиг. 32] разбиваем ХΣ на слагаемые и определяем Х6 = 0,383 и Х7 = 0,12. Начальные диаметры
Диаметры впадин зубьев
Диаметры вершин зубьев
Окружные толщины зубьев (о делительной окружности)
Проверка на заострение
Sa = 0,2 ∙ 5,5 = 1,1 мм, выполняется условие Sa6, Sa7 ≥ Sa, значит, заострения зубьев нет. По данным проведенных расчетов вычерчиваем зубчатое зацепление в масштабе μ'ℓ = 0,00025 м/мм. 4.3 Качественные показатели зацепления 1. Коэффициент перекрытия
2. Коэффициент удельного скольжения
3. Коэффициент удельного давления в полюсе
Все показатели находятся в допускаемых пределах. 5. Силовой расчет механизма Данные для расчета: отношения погонный вес q = 120 H/м; сила полезного сопротивления Рпс = 158 Н; Требуется определить давление в кинематических парах, уравновешивающую силу (момент). Выбираем положение во
время рабочего хода машины, в котором имеет место наибольшее ускорение рабочего
органа – 7-е положение. Строим планы положения механизма в масштабе μℓ
= 0,00175 Определяем положение центров тяжестей звеньев на планах а) механизма
б) скоростей
в) ускорений
Определяем веса звеньев G3 = q∙ℓ3 = 120∙0,157 = 18,84 H; G4 = q∙ℓ4 = 120∙0,367 = 44,04 H; G5 = λ∙G4 = 0,32∙44,04 = 14,09 H. Определяем силы инерции
Определяем моменты инерции звеньев
Определяем угловые ускорения и моменты сил инерции звеньев
Определяем плечи сил инерции
Силовой расчет механизма
начинаем с последней присоединенной группы Ассура – Уравнение равновесия группы под действием этих сил имеет следующий вид
Величину и направление
силы
Строим план сил в
масштабе μР = 1 Н/мм и замеряем недостающие силы R05 = 33,15 Н; Переходим к следующей
группе Ассура Уравнение равновесия группы под действием этих сил имеет следующий вид
Величину и направление
силы
Строим план сил и замеряем недостающие силы R03 = 103,27 Н. Рассмотрим ведущее звено – кривошип. На него действует сила реакции предыдущей группы R21, реакция стойки R01, уравновешивающая сила Рур. Уравнение равновесия группы под действием этих сил имеет следующий вид
Величину и направление силы Рур можно найти из уравнения моментов всех сил, действующих на звено 1, относительно точки О2
Строим план сил и определяем недостающие силы R01 = 59,29 Н. Определим уравновешивающую силу с помощью рычага Жуковского. Строим план скоростей и в соответствующих точках прикладываем внешние силы и силы инерции, поворачивая их на 90° по часовой стрелке. Составляем уравнение равновесия рычага
Отсюда получаем
6. Расчет маховика Для каждого положения механизма определяем приведенный к главному валу момент сил сопротивления, определяемый из условия равенства мощности приведенного момента и мощности силы полезного сопротивления
Для каждого положения механизма определяем приведенный к главному валу момент инерции, определяемый из условия равенства кинетических энергий
Результаты всех расчетов и замеров сведены в таблицу 6. Табл. 6
Строим графики Мпр и Jпр в масштабах μφ = 0,0175 рад/мм, μМ = 0,1 Н∙м/мм и μJ = 0,0008 кг∙м2/мм. Графическим интегрированием графика моментов получаем график приведенных работ (полюсное расстояние H = 30). Далее получаем график ΔЕпр(φ), его масштаб будет равен
Определяем минимальную и максимальную угловую скорость кривошипа
Находим углы касательных к диаграмме
Графически исключаем параметр φ и строим график ΔЕпр(J). Проводим к нему касательные под углами ψmax и ψmin. Точка пересечения касательных – новое начало координат графика. Замеряем JMX = 276,75∙0,0008 = 0,2214 кг∙м2; Епр0 = 124,79∙0б0525 = 6,552 Дж. Принимаем диаметр маховика dMX = 0,5 м, тогда вес обода будет
вес маховика с ободом и спицами равен GMX = 1,3∙Gоб = 1,3∙34,75 = 45,18 Н. Угловую скорость
кривошипа в каждом положении механизма находим по формуле Определяем мощность двигателя по формуле
Список литературы 1. Артоболевский И.И. Теория механизмов. – М., Издательство "Наука", 1965. – 776 с., ил. 2. Аллилуева Л.А., Езерская С.В., Кунивер А.С., Янченко Т.А. Методические указания к выполнению курсового проекта по теории механизмов и машин. 3-е изд., стереотипное. – Ижевск, Издательство ИжГТУ, 2004. – 72 с., ил. 3. Газизова З.С., Русаева В.А., Янченко Т.А. Задания для курсового проекта по теории механизмов и машин. Насосы и двигатели внутреннего сгорания. – Ижевск, Издательство ИжГТУ, 1980. – 32 с., ил. 4. Болотовская Т.П., Болотовский И.А., Смирнов В.Э. Справочник по корригированию зубчатых колес. – М.: Машгиз, 1962. – 216 с., ил. 5. Кореняко А.С. и др. Курсовое проектировании по теории механизмов и машин. – Киев, Издательство "Вища школа", 1970. – 332 с., ил. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
||
| НОВОСТИ |  |
|
|
||
| ВХОД | |
|
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 .
. ,
, , Z3 = 23, Z4 = 30, Z'4
= 23, Z5 = 25.
, Z3 = 23, Z4 = 30, Z'4
= 23, Z5 = 25. ;
;
 ;
; .
. ;
; ;
; .
. .
.
 ;
; ;
; .
. ;
; ;
; .
. ;
; ;
; .
. ;
; ;
; ;
; .
. .
. .
. .
.
 ;
; .
. ;
; .
. ;
; .
. ;
; , результаты расчета
занесены в таблицу 6. График изменения угловой скорости строим в масштабе 0,1
(рад/с)/мм.
, результаты расчета
занесены в таблицу 6. График изменения угловой скорости строим в масштабе 0,1
(рад/с)/мм. .
.