|
Курсовая работа: Проектирование привода пресс-автомата с плавающим ползуном
Рисунок 10. Зависимости относительных линейных скоростей характерных точек механизма от угла поворота кривошипа. ряд 1 - VА/ω1 ряд 2 - VB2/ω1 ряд 3 - VС/ω1 ряд 4 - VЕ/ω1 ряд 5 - VB4/ω1
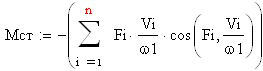
Рисунок 11. Зависимости относительных угловых скоростей звеньев механизма от угла поворота кривошипа ряд 1 - ω2/ω1 ряд 2 – ω5/ω1 СИЛОВОЙ АНАЛИЗ МЕХАНИЗМА Анализ нагруженности реального механизма представляет собой довольно сложную задачу. Для упрощения её решения в механизме с одной степенью свободы совокупность всех звеньев и усилий заменяют динамической моделью. Динамическая модель представляет собой одно звено (звено приведения) с переменными инерционными характеристиками, находящиеся в равновесии под действием момента движущих сил, приложенного со стороны привода, и момента сил сопротивления, определяемого силами полезных и вредных сопротивлений. Так как природа этих усилий различна, то их целесообразно разделить на усилия, независимые от времени – силы статического сопротивления и усилия, связанные с переменностью движения звеньев – силы динамического сопротивления. Соответственно, момент движущих сил, приложенный к кривошипу, определяется двумя составляющими: Мдв=Мст+Мдин , (1) где Мдв – момент движущих сил; Мст – момент движущих сил, предназначенный для преодоления сил статического сопротивления (статический момент); Мдин – момент движущих сил, предназначенный для преодоления сил динамического сопротивления (динамический момент). ОПРЕДЕЛЕНИЕ МОМЕНТА МСТ(Φ) ДЛЯ ПРЕОДОЛЕНИЯ СИЛ СТАТИЧЕСКОГО СОПРОТИВЛЕНИЯИспользуя теорему мощностей, можно записать формулу для расчёта статического момента, предназначенного для преодоления сил статического сопротивления:
где Fi – сила статического сопротивления, приложенная в i-ой точке механизма; Vi – линейная скорость i-ой точки механизма; ω1- угловая скорость кривошипа 1; Fi^(Vi/ω1) – угол между вектором i-ой силы и вектором скорости точки её приложения; n – число сил сопротивления статического характера. Статический момент, предназначенный для преодоления сил статического сопротивления вычисляется по формуле: Мст= -[G2·(VB2/ω1)·cos(G2,VB2/ω1)+G3·(VB2/ω1)·cos(G3,VB2/ω1)+G4· ·(VB4/ω1)·cos(G4,VB4/ω1)+G5·(VE/ω1)·cos(G5,VE/ω1)+Q·(VB4/ω1) ·cos(Q,VB4/ω1)] , (3) Третье слагаемое равно нулю, т.к. угол G4,VB4/ω1 равен 90ْ или 270ْ в зависимости от положения пуансона, следовательно, cos(G4,VB4/ω1)=0 во всех положениях. Пятое слагаемое нужно записывать со знаком минус (угол Q,VB4/ω1 =180ْ , cos180ْ =-1); оно не равно нулю в те моменты времени, когда пуансон выдавливает заготовку, следовательно, формула (3) примет вид: Мст= -[G2·(VB2/ω1)·cos(G2,VB2/ω1)+G3·(VB2/ω1)·cos(G3,VB2/ω1)+G5· ·(VE/ω1)·cos(G5,VE/ω1)-Q·(VB4/ω1)] , (4) Значения углов между вектором i-ого усилия и вектором скорости i-ой точки приведены в таблице 3. Таблица 3. Значения углов между вектором 1-ого усилия и вектором 1-ой точки.
Проведём расчёт Мст для каждого из выбранных положений механизма: Мст1=-(2500·0,025·cos(180ْ)+800·0,025·cos(180ْ)+1500·0)=-(-62,5-20)=82,5 (н·м); Мст2=-(2500·0,032·cos(128ْ)+800·0,032·cos(128ْ)+1500·0,012·cos(79ْ))=-(-49,25-15,76+3,43)=61,58 (н·м); Мст3=-(2500·0,046·cos(104ْ)+800·0,046·cos(104ْ)+1500·0,023·cos(84,5ْ))=-(-27,82-8,9+3,31)=33,41 (н·м); Мст4=-(2500·0,05·cos(90ْ)+800·0,05·cos(90ْ)+1500·0,025·cos(90ْ)-1750·0,05)=-(0+0+0-87,5)=87,5 (н·м); Мст5=-(2500·0,043·cos(77ْ)+800·0,043·cos(77ْ)+1500·0,02·cos(98,5ْ)-5540·0,042)= -(24,18+7,74-4,43-232,68)=205,19 (н·м); Мст6=-(2500·0,031·cos(52ْ)+800·0,031·cos(52ْ)+1500·0,011·cos(102ْ))=-(47,71+15,27-3,43)= -59,55 (н·м); Мст7=-(2500·0,025·cos(0ْ )+800·0,025·cos(0ْ )+1500·0)=-(62,5+20)=-82,5 (н·м); Мст8=-(2500·0,037·cos(46ْ)+800·0,037·cos(46ْ)+1500·0,014·cos(78ْ))=-(64,26+20,56+4,37)= -89,19 (н·м); Мст9=-(2500·0,045·cos(69,5ْ)+800·0,045·cos(69,5ْ)+1500·0,021·cos(82ْ))= -(39,4+12,61+4,38)=-56,39 (н·м); Мст10=-(2500·0,05·cos(90ْ )+800·0,05·cos(90ْ )+1500·0,025·cos(90ْ ))=-(0+0+0)=0 (н·м); Мст11=-(2500·0,046·cos(110ْ)+800·0,046·cos(110ْ)+1500·0,022·cos(97ْ))=-(-39,33-12,59-4,02)=47,9 (н·м); Мст12=-(2500·0,036·cos(132ْ)+800·0,036·cos(132ْ)+1500·0,014·cos(101ْ))=-(-60,22-19,27-4,01)=75,48 (н·м); Мст13=-(2500·0,025·cos(180ْ )+800·0,025·cos(180ْ )+1500·0)=-(-62,5-20)=82,5 (н·м). ОПРЕДЕЛЕНИЕ МОМЕНТА МДИН (Φ) ДЛЯ ПРЕОДОЛЕНИЯ СИЛ ДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯСилы динамического сопротивления, действующие в механизме, также как и силы статического сопротивления могут быть приведены к кривошипу. Динамический момент найдём по формуле: Мдин= ω1²/2·dIпр/dφ+ε1·Iпр , (5) где ω1 – угловая скорость кривошипа; ε1 – угловое ускорение кривошипа; φ – угол поворота кривошипа; Iпр – приведённый момент инерции механизма. Т.к. угловая скорость кривошипа ω1 постоянная, то ε1=0. Значит формулу (5) можно записать в виде: Мдин= ω1²/2·dIпр/dφ , (6) где величина ω1²/2=const, а ω1=2π·n1/60=2·3,14·140/60=14,65 рад, следовательно, ω1²/2=107,3113 рад². Параметр Iпр определяется формулой Iпр=∑(mi·(Vi/ω1)²+ Ii·(ωi/ω1)²) , (7) где mi – масса i-ого звена, mi= Gi/g; Ii – момент инерции i-ого звена относительно полюса; Vi/ω1 и ωi/ω1 – кинематические передаточные функции; n – количество весомых звеньев. Рассчитаем значения момента инерции (Iпр) для каждого из положений механизма. Для нашего случая формулу (7) можно записать в следующем виде: Iпр=(m2·(VB2/ω1)²+ (m2·(l2)²/12)·(ω2/ω1)²)+( (m5·(l5)²/3) · (ω5/ω1)²)+m4· ·(VB4/ω1)²+ m3·(VB2/ω1)² , (8) где m2=G2/g=2500/9,8=255,1 (кг) – масса шатуна; m3=G3/g=800/9,8=81,6 (кг) – масса ползуна; m4=G4/g=1000/9,8=102 (кг) – масса пуансона; m5=G5/g=1500/9,8=153,1 (кг) – масса кулисы; I2=m2·(l2)²/12=255,1·(0,6)²/12=7,653 (кг·м²) – момент инерции шатуна; I5=m5·(l5)²/3=153,1·(0,21)²/3=2,251 (кг·м²) – момент инерции кулисы. Подставив найденные значения m2, m3, m4, I2, I5 (эти величины постоянные) в формулу (8), получим: Iпр=255,1·(VB2/ω1)²+7,653·(ω2/ω1)²+2,251·(ω5/ω1)²+102·(VB4/ω1)²+ 81,6· ·(VB2/ω1)² , (9) Iпр=336,7·(VB2/ω1)²+7,653·(ω2/ω1)²+2,251·(ω5/ω1)²+102·(VB4/ω1)² , (9) Проведём расчёт Iпр для всех выбранных положений механизма по формуле (9): Iпр1=336,7·(0,025)²+7,653·(0,083)²+2,251·(0)²+102·(0)²=0,21+0,053=0,263 (кг·м²); Iпр2=336,7·(0,032)²+7,653·(0,082)²+2,251·(0,115)²+102·(0,025)²=0,345+0,052+0,030+ +0,064=0,491 (кг·м²); Iпр3=336,7·(0,046)²+7,653·(0,05)²+2,251·(0,22)²+102·(0,044)²=0,712+0,019+0,109+ +0,197=1,037 (кг·м²); Iпр4=336,7·(0,05)²+7,653·(0)²+2,251·(0,238)²+102·(0,05)²=0,842+0+0,128+0,255=1,225 (кг·м²); Iпр5=336,7·(0,043)²+7,653·(0,051)²+2,251·(0,193)²+102·(0,042)²=0,623+0,02+0,084+ +0,180=0,907 (кг·м²); Iпр6=336,7·(0,031)²+7,653·(0,079)²+2,251·(0,107)²+102·(0,024)²=0,324+0,048+0,026+ +0,059=0,457 (кг·м²); Iпр7=336,7·(0,025)²+7,653·(0,083)²+2,251·(0)²+102·(0)²=0,210+0,053+0+0=0,263 (кг·м²); Iпр8=336,7·(0,037)²+7,653·(0,068)²+2,251·(0,129)²+102·(0,028)²=0,461+0,035+0,037+ +0,08=0,613 (кг·м²); Iпр9=336,7·(0,045)²+7,653·(0,035)²+2,251·(0,197)²+102·(0,042)²=0,682+0,01+0,087+ +0,18=0,959 (кг·м²); Iпр10=336,7·(0,05)²+7,653·(0)²+2,251·(0,238)²+102·(0,05)²=0,842+0+0,126+0,255=1,223 (кг·м²); Iпр11=336,7·(0,046)²+7,653·(0,035)²+2,251·(0,21)²+102·(0,043)²=0,712+0,01+0,099+ +0,189=1,01 (кг·м²); Iпр12=336,7·(0,036)²+7,653·(0,062)²+2,251·(0,133)²+102·(0,027)²=0,436+0,029+0,04+ +0,074=0,579 (кг·м²); Значение первой производной приведённого момента инерции по углу поворота кривошипа определим, используя аппроксимацию первой производной конечными разностями: I´прi=(dIпрi/dφi)=(Iпр(i+1) -Iпрi)/(φ(i+1) -φi) , (10) где Iпр(i+1), Iпрi – значения приведённого момента инерции для i+1 и i-го положений кривошипа, соответственно; φ(i+1) и φi – значения угла поворота кривошипа для i+1 и i-го положений кривошипа, соответственно. Для вычисления первой производной I´пр(φ) по формуле (10) необходимо дополнительно разбить график Iпр(φ) на интервалы, т.к. стандартных двенадцати положений явно недостаточно. В положениях 8, 15, 22 функция Iпр(φ) имеет экстремумы, поэтому первая производная I´пр(φ) в этих точках равна нулю. Проведём расчёт I´пр(φ) по формуле (10): |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||