|
Дипломная работа: Разработка оборудования для уплотнения балластной призмыТогда:
В итоге по формуле (2.10) получили:
Принята FВ = 90 кН. По найденной FВ и принятой компоновке вибровозбудителя найдём вынуждающую силу одного дебаланса FВ’: FВ’ = FВ / n,(2.16) где n – принятое число дебалансов (n=4). FВ’ = 90 / 4 = 22,5 кН . Предварительно назначается расчётная длина вала дебаланса (рисунок 2.4) равная lв = 0,22.
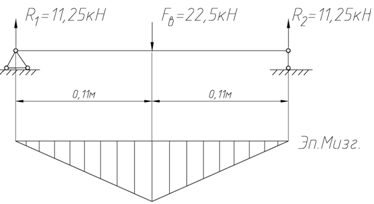
Рисунок 2.4 – Схема дебаланса Для нахождения диаметра вала строится эпюра изгибающего момента. Для этого находятся реакции в точках опоры (рисунок 2.5)
Рисунок 2.5 –Эпюра изгибающего момента Максимальный изгибающий момент равен: Mmax = R1 · 0,11 =11,25 · 0,11 =1,24 кН · м . Прочность вала:
где W –
момент сопротивления при изгибе, м3 ; (для круглого сечения
где σFlim – предел длительной выносливости, МПа; SF – коэффициент безопасности (для Ст 45 - SF = 1,75 , [2] стр. 90). Для стали 45 : σFlim =1,8 НВ,(2.19) где НВ – твёрдость стали (для стали 45 HB = 248,5 , источник [2] стр.426). Допускаемое напряжение равно: [σ] = (1,8·248,5)/1,75 =255,6 МПа. Находится диаметр вала по формуле:
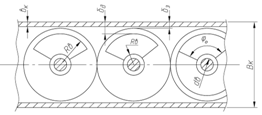
Принят d = 40 мм ([2] стр. 296) 2.1.3.1 Компоновка дебалансов Неуравновешенные части дебалансов в сечении имеют форму кругового сектора. Значение r0 (расстояние от оси вращения до центра тяжести дебаланса) зависит от угла сектора φ0 внешнего Rв и внутреннего rв радиусов дебаланса (рисунок 2.6). Угол φ0 по рекомендациям [1] назначается 120˚. Радиус Rв предварительно определяется выражением: Rв = 0,5· ВК – δД – bК, (2.21) где δД – зазор между дебалансом и стенкой корпуса, м (δД = 0,045 м); bК – толщина корпуса виброплиты, м (bК = 0,01 м). Rв = 0,5·0,35 – 0,02 – 0,01 = 0,12 м.
Рисунок 2.6 – Схема компоновки дебалансов Расстояние от оси вращения до центра тяжести дебаланса:
Внутренний радиус дебаланса:
где δст – ширина ступицы, м (принимается конструктивно δст=0,02 м)
Тогда
При требуемых силе Fв’ , частоте ω и установленном r0 определяется масса неуравновешенной части дебаланса:
Площадь дебаланса, м2 :
Длина дебаланса, м:
где ρ – плотность металла, кг/м3 (ρ =7800 кг/м3).
2.2 Мощность, необходимая при виброобжатии балласта Затраты мощности при виброподбивке шпал представлены в виде: Рв = Рб + Pвс, (2.27) где Рб – средняя мощность, необходимая для преодоления сопротивлений колебаниям виброплиты от балласта и рессорной подвески, Вт; Pвс – мощность, необходимая для преодоления внутренних сопротивлений вибровозбудителя, Вт.
где φ - фаза вынужденных колебаний по отношению к фазе возмущающей силы, град; Fв – максимальная вынуждающая сила, Н (Fв=90·103Н).
где h – коэффициент демпфирования, с-1 (h = 7,2 с-1); ω0 – частота свободных колебаний плиты с учётом жёсткости балласта, с-1 (ω0=55,26 с-1).
По формуле (2.28) находится:
Мощность
где P0 – мощность, необходимая для преодоления диссипативных сопротивлений вращению, Вт. Р0 =0,5·Fв · dв·ω ·fn, (2.31) где fn – приведённый коэффицент трения в подшипниках дебелансного вала, fn = 0,001 ( [3] стр.148). P0 = 0,5·90 ·103·0,04 ·188,4·0,001 = 339,12 Вт Находится PВМ : PВМ = 0,02 · P0 , (2.32) PВМ = 0,02 · 339,12 = 6,7 Вт Находим Р33 по формуле:
где ηз – КПД зубчатой передачи синхронизатора (ηз = 0,96 – [2] стр. 23); m – количество зубчатых зацеплений (m=4). Pзз= (4246 +339,12) · (1 – 0,964) = 690,7 Вт. Тогда: Pвс’ = 339,12 + 6,7 + 690,7 = 1036,8 Вт. В итоге суммарные затраты мощности равны: Pв = 1036,6 + 4246 = 5282,3 Вт. В некоторые моменты работы виброплиты могут возникнуть ситуации, такие как совпадение фазы вынужденных колебаний с фазой возмущающей силы. Максимально возможные значения Рб возможно при sin2 φ0 =1:
Максимально возможные потери мощности в зубчатом зацеплении: P33max = (25570+339,12)(1-0,964) = 3801,1 Вт. Тогда мощность PВС’ max: PВС’ max = 339,12 + 6,7 + 3801,1 = 4146,9 Вт. В итоге максимально возможная мощность, затрачиваемая на виброподбивку шпал равна: Pв max = 25570 + 4146,9 = 29716,9 Вт. Для того чтобы учесть возрастание сопротивления на виброподбивку шпал, при попадании плиты в резонанс, при выборе двигателя возьмём среднее значение мощности Pв ср: Pв ср = (5282,6 +29716,9)/2 =17499,7 Вт ≈17,5 кВт. Потребная мощность двигателя вибровозбудителя подбивочной плиты, кВт: Pв ср = Pв ср / ηn,(2.34) где ηn – КПД передачи от двигателя до ведущего вала вибровозбудителя (ηn = 0,98). Pдв = 17,5/0,98 =17,85 кВт. Выбирается асинхронный двигатель с фазным ротором ([2] стр.27) таблица 2.1: Таблица 2.1 – Характеристики асинхронного двигателя 4А160М2У3
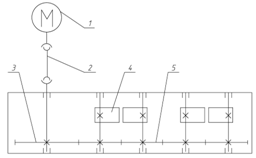
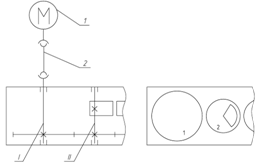
Находится крутящий момент на валу двигателя, H·м: Тmax = 9550 · PH / nH ;(2.35) Тmax = 9550 · 18,5/ 1467= 120,43 H·м. Учитывая разность частоты вращения валов дебалансов и частоты вращения вала двигателя устанавливается дополнительный вал с зубчатым колесом повышающим частоту вращения вала дебаланса (рисунок 2.7). Для передачи крутящего момента от вала двигателя к ведущему валу дебалансов устанавливается карданный вал от ГАЗ – 53 [8], который рассчитан на Pmax = 84,6 кВт ; Тmax = 284,4 H·м ; n = 2000 об/мин.
1 – двигатель; 2 – карданный вал; 3 – ускоряющее зубчатое колесо; 4 – дебаланс; 5 – синхронизирующие зубчатые шестерни. Рисунок 2.7 – Привод виброплиты 2.3 Расчёт цилиндрической зубчатой передачи внешнего зацепления Исходные данные: Максимальный крутящий момент на тихоходном валу Тmax I = 120,43 H·м Частота вращения ведущего (ведомого) вала nII = 1800 об/мин Частота вращения ведомого (ведущего) вала nI = 1467 об/мин Материал шестерни ст 40Х У Материал колесаст 40Х ТВ4 Передаточное отношение: u21 = nII / nI =1800/1467 =1,22.
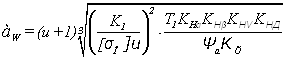
I – тихоходный вал; 1 – зубчатое колесо; II – быстроходный вал; 2 – шестерня. Рисунок 2.8 – Зубчатая передача внешнего зацепления Расчёт произведён на ЭВМ (программа ДМ – 1). 2.3.1 Алгоритм расчёта зубчатой передачи (силовой расчёт). 1) Определяется по контактным напряжениям межосевое расстояние aW в мм по формуле :
где u – передаточное число рассчитываемой передачи (u = 1,22); K1 – вспомогательный численный коэффициент (K1 = 315 [2]); [σH] – допускаемое контактное напряжение, МПа; Т1 – крутящий момент на валу колеса, H·мм; KНα – коэффициент распределения нагрузки (KНα = 1 [2]); KНβ – коэффициент концентрации нагрузки ( [2] ст 92) ;KНV – коэффициент динамичности [2]; KНД – коэффициент долговечности лимитирующего колеса [2]; Ψa – коэффициент ширины венца, принимается из единого ряда [2 стр. 52] (Ψa = 0,2 …0,4); KХ – коэффициент, учитывающий смещение. 2) Ширина колеса в мм: b2 = Ψa· aW.(2.36) 3) Модуль зацепления m в мм из расчёта на изгиб ориентировочно определяется по формуле:
где K2 – численный коэффициент (для прямозубых колёс K2 = 5); KFα , KFβ , KFv ,KFД – коэффициенты, аналогичные KНα , KНβ , KНV , KНД определяются по [2]; [σF] – допускаемое изгибное напряжение лимитирующего колеса, МПа ([2] стр. 91). 4) Расчёты по формулам (2.35)…(2.36) составляют программу ДМ – 1. Машина выдаёт на печать исходные данные и величины aW ,b2 и m в миллиметрах. Полученные данные подлежат обработке. Значения aW и b2 выбираются из единого ряда ([2], ст 51). Допускается их округление по ГОСТ 6636 – 69 ([2] ст 296). Модуль округляется в большую сторону. 2.3.2 Алгоритм геометрического и проверочного расчёта зубчатой передачи Определение чисел зубьев: 1) Суммарное число зубьев ZΣ: ZΣ = 2·aW· cos β / m ,(2.38) где β – угол наклона линии зуба. Величина ZΣ округляется до ближайшего целого числа. 2) Число зубьев шестерни Z1 : Z1 = ZΣ / (u + 1).(2.39) 3) Число зубьев колеса Z2: Z2 = ZΣ – Z1.(2.40) 4) Окружная скорость колёс v, м/с:
5) Уточнённое передаточное число u 21: u 21 = Z2 /Z1.(2.42) 6) Ширина шестерни b2, мм: b2 = 1,1 b2.(2.43) 7) Межосевое расстояние, мм: aW = 0,5·m(Z1 + Z2) + (Х1 + X2 – Δy)m ,(2.44) где Х1 , X2 – коэффициенты смещения (Х1 = X2=0 [2]); Δy – коэффициент уравнительного смещения (Δy = 0 [2]). 8) Угол наклона линии зуба для прямозубых колёс β = 0. 9) Делительные диаметры d, мм: d = m · z / cos β.(2.45) 10) Диаметр вершин d a, мм: d a = d + (2 + 2x– 2Δy)m.(2.46) 11) Диаметр впадин d f , мм: d f = d – (2,5 – 2x)m.(2.47) 12) Окружная толщина зубьев по делительной окружности St, мм: St = (π/(2cos β) + 2x·tgα)m.(2.48) 13) Угол зацепления αW:
где α – угол профиля (α = 20˚). 14) Торцевой коэффициент перекрытия εα:
15) Коэффициент суммарной длины контактных линий Zε:
16) Угол наклона линии зуба по основной окружности βв:
17) Коэффициенты формы сопряжённых поверхностей зубьев в полосе зацепления Zн:
18) Рабочее контактное напряжение σн, мПа:
где 19) Отклонение рабочего контактного напряжения от допускаемого ∆σн, %:
20) Окружное усилие Ft, H:
где
где
21) Радиальное усилие Fy, H:
22) Осевое усилие Fa, H:
23) Коэффициент перекрытия зубьев Yε : Yε=1. 24) Коэффициент наклона зубьев Yβ : Yβ=1. 25) Рабочее изгибное напряжение зубьев шестерни σF2, мПа:
26) Рабочее изгибное напряжение колеса σF1, мПа:
27) Максимальное контактное напряжение σн max, мПа:
28) Максимальное изгибное напряжение σF max, мПа:
Значения рассчитываемых величин представлены на распечатках результатов расчёта, сделанного на ЭBM (программа ДМ-1). 2.3.3 Результаты расчёта зубчатой передачи, выданные ЭВМ
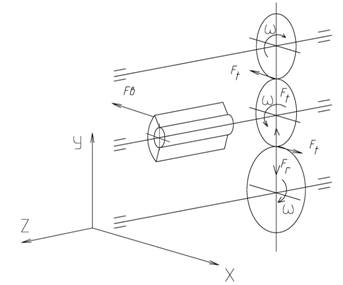
2.3.4 Анализ результатов расчёта зубчатой передачи Геометрические параметры округляем до сотых долей миллиметра. По допускаемым и рабочим напряжениям делаем вывод, что прочность достаточна. Усилие в зацеплении округляем с точностью до целых. 2.4 Уточнённый расчёт валов и выбор подшипников Данный расчёт даёт более достоверные результаты, чем ориентировочный расчёт. В этом разделе исходными данными являются: силы, действующие на колесо шестерни, расстояния между линиями действия всех сил, диаметры колёс. Для наглядного представления изобразим аксонометрическую схему нагружения валов (рисунок 2.9).
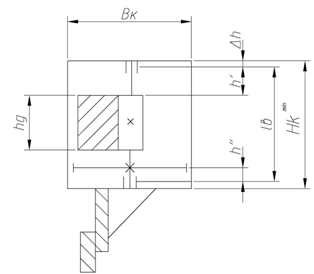
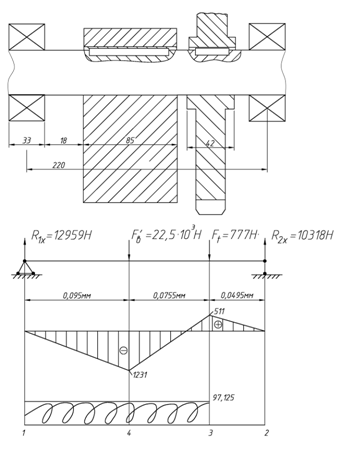
Рисунок 2.9 – Схема нагружения валов 2.4.1 Расчёт дебалансного вала Для уточнённого расчёта выполним эскизную компоновку элементов вала (рисунок 2.10). Предварительно назначаем подшипник по ГОСТ 5720 – 75: № 1608 с d=40 мм, D =90 мм, B =33 мм [2].
Рисунок 2.10 – Эскизная компановка элементов вала На вал действуют две силы в направлении X (рисунок 2.10, б) F’в , Ft и крутящий момент T. Составим уравнения суммы моментов относительно точек 1 и 2, найдём реакции в этих точках. ΣM1=0
ΣM2=0
Находим изгибающий момент в т. 1, 2, 3 ,4 (Рисунок 2.10, в):
Максимальный изгибающий момент в т.4 под дебалансом. Приведённый момент:
где α – коэффициент учитывающий соответствие центров касательного и нормального напряжения (α = 0,75 [4]); T – крутящий момент, Н·м. T =Ft·d/2 ,(2.65) где d – делительный диаметр шестерни (d = 0,25 м); T =777·0,25/2=91,125 Н·м.
Диаметр вала по формуле:
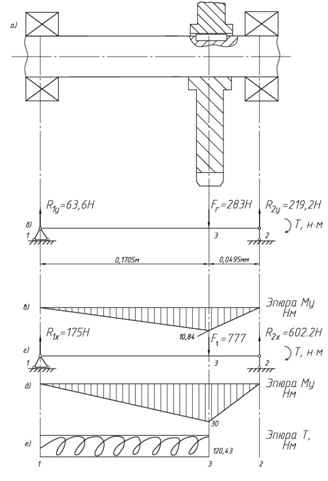
Окончательно принимается диаметр вала d = 0,04 м. 2.4.1.1 Выбор подшипников Ранее принятый подшипник (см. п.2.4.1) проверяем на динамическую грузоподъёмность: Стабл. >Cрасч,(2.67) где Стабл. – динамическая грузоподъёмность взятая из таблицы [3], (Стабл. = 44,9 кН); Cрасч. – динамическая грузоподъёмность полученная методом расчёта, кН. Cрасч. = L1/P·P,(2.68) где p – показатель степени (для шарикоподшипников p = 3 [2]); L – номинальный ресурс подшипников, млн. об.; P – эквивалентная нагрузка, Н. L = Ln·60·nII /106,(2.69) где Ln – номинальный ресурс в часах (примем Ln=125 ч) L = 150·60·1800/106=16,2 млн.об. Эквивалентная нагрузка, Н: P = R·V·Kδ·KТ , (2.70) где R – радиальная нагрузка, Н (R = 12959 Н); V – коэффициент вращения (V=1,[2] стр. 359) Kδ – коэффициент, учитывающий нагрузки (Kδ =1,35,[2] стр. 362 ); KТ – температурный коэффициент (KТ =1 [2]). P = 12959·1·1,35·1=17494,65 H. Срасч.=16,21/3·17494,65=44266,67 H. Условие (2.67) выполняется. Окончательно принимаем для дебалансного вала шарикоподшипник радиальный сферический двухрядный (по ГОСТ 5720 – 75) [2]: № 1608 С=44,9 мм; d=40 мм; D=90 мм; B=33 мм. 2.4.2 Расчёт ведущего вала вибровозбудителя Выполним эскизную компоновку элементов вала (рисунок 2.11, а). На вал действуют две силы в двух плоскостях: Fr в плоскости y0z и Ft в плоскости x0z и действует крутящий момент T (рисунок 2.11, а, г).
Рисунок 2.11 – Эпюра моментов Находятся реакции в опорах в плоскости z0y (рисунок 2.11, а):
Находится изгибающий момент в точках 1, 2, 3 (рисунок 2.11, в):
Находятся реакции в опорах в плоскости z0x (рисунок 2.11, г):
Находится изгибающий момент в точках 1, 2, 3 (рисунок 2.11, д):
Максимальный момент приложен в точке 3 под зубчатым колесом:
Приведённый момент по формуле (2.64):
Тогда наименьший диаметр вала равен по формуле (2.66):
Конструктивно принимаем диаметр ведущего вала вибровозбудителя d=0,04м. 2.4.2.1 Выбор подшипников По ГОСТ 5720 – 75 выбран радиальный сферический двухрядный шарикоподшипник [2]: №1208 C = 19кН; d = 40 мм; D = 80 мм; B = 18 мм. Проверяют его на динамическую грузоподъёмность по условию (2.67). Эквивалентная нагрузка по формуле (2.70):
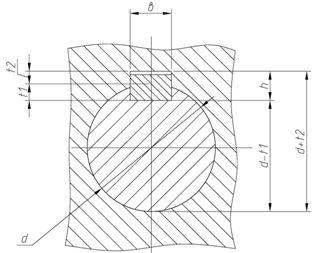
Срасч.=16,21/3·865,15=2189 H < Стаб. Условие (2.67) выполняется – подшипник выбран верно. 2.5 Расчёт и выбор шпонки Размеры призматических шпонок (рисунок 2.12): ширина b, высота h, глубина паза t1 и ступицы t2 выбираем в зависимости от диаметра вала. Длину шпонки принимаем из стандартного ряда на 5 – 10 мм меньше длины ступицы.
Рисунок 2.12-Призматическая шпонка Выбранную шпонку проверяют на смятие:
где Результаты расчётов сведём в таблицу 2.2. Таблица 2.2 - Результаты расчетов |
|
|||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 .(2.22)
.(2.22)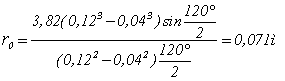 .
.
 , (2.35)
, (2.35)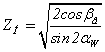 .(2.53)
.(2.53) ,(2.53)
,(2.53)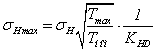 .(2.62)
.(2.62)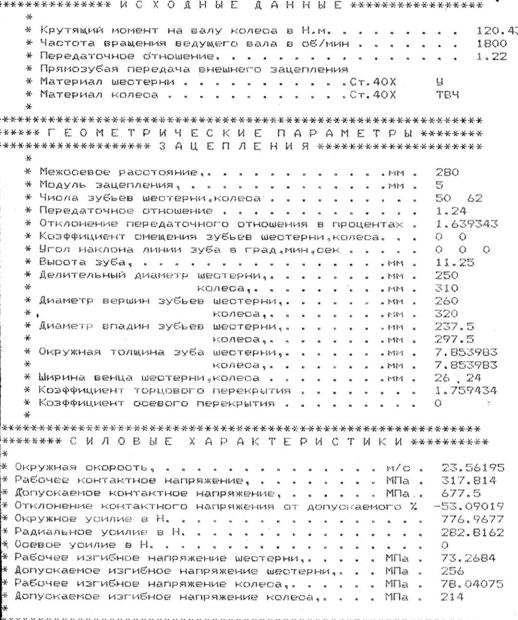
 ,(2.66)
,(2.66)