|
Курсовая работа: Теория механизмов и машинКурсовая работа: Теория механизмов и машин1 Структурный и кинематический анализ главного механизмаВыходные данные согласно заданию к курсовому проекту. 1. Схема двухпоршневого V - образного насоса (рис. 1.1) 2. Угловая скорость кривошипа 3. Погонная единица массы 4. Коэффициент 5. Коэффициент 6. Угол 7. Длина кривошипа 8. Длина шатуна 9. Неравномерность хода
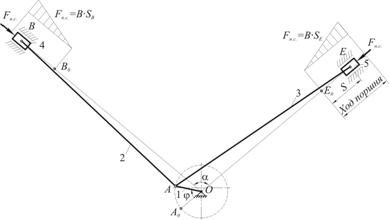
Рис. 1.1. Кинематическая схема механизма 1.1 Структурный анализ механизмаМеханизм двухпоршневого горизонтального насоса состоит из 6 звеньев: 1 – кривошип ОА; 2, 3 – шатуны АB и AE; 4, 5 – ползуны (поршни) B и E; 6 – стойка. Звенья механизма образуют 7 кинематических пар, из которых 5 вращательных и 2 поступательные. Согласно формуле Чебышева степень свободы определиться как
где
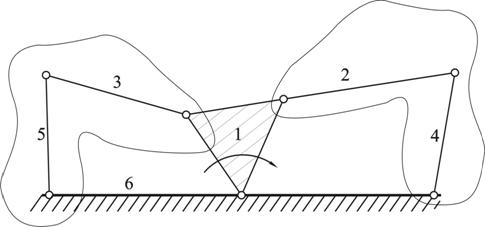
Таким образом, механизм имеет одну степень свободы. На рис. 1 изображена структурная схема механизма с разбиением на группы Асура и начальный механизм. Структурная схема наглядно показывает, что механизм состоит из начального механизма 1 класса (стойка 6 и кривошип 1) и двух групп Асура (шатун 2 и ползун 4, шатун 3 и ползун 5).
Рис. 1.2 Структурная схема механизма Структурная формула механизма:
Механизм относится к механизмам II класса по классификации И. И. Артоболевского. 1.2 Построение плана положений механизмаНа листе формата А1 изображаем в масштабе план положений механизма. План строим в такой последовательности. Выбираем масштаб построения:
Выбираем произвольную точку О и из нее описываем окружность радиуса ОА. Начальное положение точки А (АО) выбираем согласно исходной схемы на продолжении направляющей ОE, при пересечении ее с вычерченной окружностью. От точки АО в направлении вращения кривошипа ОА разбиваем окружность на 12 равных частей, через каждые 30 градусов, проставляя при этом последовательно точки А1, А2 и т. д. Соединив полученные точки с центром окружности О, получим 12 положений кривошипа ОА. Точка E принадлежит шатуну АE и ползуну E и движется поступательно по направляющей ОE, поэтому для построения плана положений звена АE из каждой точки А раствором циркуля, равным длине шатуна АE в принятом масштабе, делаем засечки на направляющей, получая точки E1, E2 и т. д. План положений для звена AB строим аналогично. 1.3 Построение планов скоростейПаны скоростей строятся по векторным уравнениям, которые составляются отдельно для каждой группы Асура в порядке присоединения их к ведущему звену. Для ведущего звена ОА определяем величину скорости точки А:
Вектор
и вычисляем отрезок
Из произвольной точки Р, называемой полюсом плана скоростей,
откладываем в указанном направлении отрезок Составляем векторное уравнение, по которому определим скорость точки B, принадлежащей шатуну АB и ползуну B.
Скорость точки А известна, скорость относительного вращения точки B вокруг точки А перпендикулярна радиусу вращения отрезку АB и определяется по формуле
Скорость точки B направлена вдоль направляющей АB. Таким образом, получаем векторное уравнение, в
котором два вектора известны по направлению, но неизвестны по величине, а
третий вектор известен по направлению и по величине. Решая это векторное
уравнение графическим способом, получим план скоростей для группы Асура,
состоящей из звеньев 2 и 4. В соответствии с векторным уравнением через конец
вектора
Пользуясь построенным планом скоростей, можно определить
угловую скорость
Для определения направления Аналогично строим план скоростей для группы Ассура (звенья 3 и 5) по уравнению:
и определяем угловую скорость шатуна AE:
Для определения направления Изложенным выше способом строим планы скоростей для остальных 11 положений. Результаты построения заносим в таблицу 1.1. Таблица 1.1
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||