|
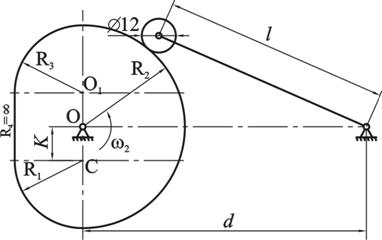
Курсовая работа: Теория механизмов и машинРасхождение результатов не превышает 5% Превышение 5% в расхождении значений ускорений точки В объясняется погрешностью при выполнении графического дифференцирования. 2 Кинематический анализ кулачкового механизма2.1 Построение плана положенийЗадан кулачковый механизм (рис. 2.1) с размерами: 1.
Радиус 2.
Радиус 3.
Радиус 4.
Расстояние 5.
Длина 6.
Расстояние 7.
Угловая скорость
Рис. 2.1 Кинематическая схема кулачкового механизма В соответствии с исходными данными строим в масштабе кулачек,
масштабный коэффициент при этом выбираем Задача анализа кулачкового механизма сводится к определению положений толкателя в зависимости от положения кулачка и установлению скоростей и ускорений толкателя. Для кулачкового механизма с вращательным движением толкателя, снабженным роликом, задача об определении положения и перемещения толкателя решается следующим образом. Центр вращения ролика всегда находится от действительного
профиля кулачка на расстоянии, равном радиусу ролика Дополнительно берем точки 2, 8, 9, 14, соответствующие
моменту перехода ролика от одного участка кулачка к другому (Под участком
понимаем часть профиля кулачка с одинаковым законом изменения профиля). Угловое
перемещение толкателя буде определять как разность углов произвольного
Линейное перемещение ролика будет пропорционально угловому перемещению:
2.2 Построение диаграммы перемещений толкателяДиаграмма перемещений толкателя строится следующим образом. Строим систему координат. По оси ординат откладываем
перемещения толкателя. По оси абсцисс будем откладывать угловое перемещение
кулачка, масштабный коэффициент равен Масштабный коэффициент перемещения толкателя 2.3 Построение диаграмм скорости и ускорения толкателя.Диаграмма скорости толкателя строится путем графического дифференцирования диаграммы перемещения методом хорд. Масштабный коэффициент диаграммы скорости толкателя:
где
Диаграмма ускорения строится методом графического дифференцирования диаграммы скорости. Масштабный коэффициент диаграммы ускорения равен
Для получения величины скорости необходимо ординату диаграммы скорости умножить на масштабный коэффициент. Для получения величины ускорения толкателя необходимо ординату диаграммы ускорения умножить на масштабный коэффициент. 2.4 Построение диаграммы изменения угла давления.Угол давления – это угол между вектором скорости толкателя и нормалью к точке касания толкателя и кулачка. Для каждого положения кулачка измеряем угол давления и строим зависимость угла давления от угла поворота кулачка. Масштабный коэффициент
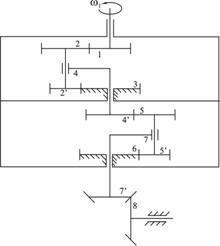
3 Кинематический анализ сложного зубчатого механизма3.1 Выходные данныеЗадана схема сложного зубчатого механизма, показанная на рисунке 3.1, для которой в таблице 3.1 представлены выходные данные: число зубьев, модуль зацепления, угловая скорость колеса 1 и радиусы колес, вычисленные по формуле:
где
Рис. 3.1 Определим незаданные размеры колес и водил
Таблица 3.1
Изображаем схему механизма в масштабе 3.2 Кинематический анализ сложного зубчатого механизма, выполненный аналитическим способомСхема зубчатого редуктора состоит из нескольких ступеней – двух планетарных редукторов Давида и пары с неподвижными осями. Передаточное отношение первого планетарного механизма Давида определяем от колеса 1 до водила 4.
где Передаточное отношение второго планетарного механизма Давида определяем от колеса 4’ до водила 7.
Передаточное отношение зубчатой пары 7’ – 8
Передаточное отношение редуктора
3.3 Кинематический анализ сложного зубчатого механизма, выполненный графическим способомПроводим снизу от схемы редуктора горизонтальную прямую.
Вдоль оси Проводим из точки А колеса 1 вертикальную линию до
пересечения с горизонтальной прямой. От точки пересечения перпендикулярно
откладываем в масштабе
Соединяем конец вектора Аналогично определяем законы распределения скоростей для остальных колес. Для построения плана угловых скоростей проведем две линии:
горизонталь и вертикаль. На вертикальной линии отложим масштабе значение
угловой скорости первого колеса Масштабный коэффициент
Определяем угловые скорости колес. Данные расчета приведены в таблице 3.2 Передаточное отношение редуктора определим из плана угловых скоростей
Таблица 3.2
3.4 Сравнение результатов кинематического анализаСравниваем передаточные отношения, найденные аналитическим и графическим способами.
3.5 Синтез эвольвентного зацепленияНарезание эвольвентных профилей зубьев методом обкатки наиболее распространенный способ изготовления зубчатых колес
Рис. 3.2 Общий вид приспособления ТММ – 42 для вычерчивания профиля зубьев методом обкатки показан на рисунке 3.2. Основание 1 имеет паз для перемещения подвижной планки 2, на которой винтами 9 фиксируется рейка 3 и ось, вокруг которой поворачивается соединенные между собой два диска 4. Нижний диск имеет диаметр делительной окружности нарезаемого колеса. Концы стального троса, охватывающего диск, закреплены на подвижной планке. Натяжение троса обеспечивается с помощью рычага 5. На верхнем диске прижимной шайбой 6 закрепляется бумажный диск, имитирующий заготовку. Прерывистое перемещение рейки относительно заготовки обеспечивается храповым механизмом путем нажимом на клавишу 7. при каждом нажатии рейка перемещается влево на один шаг. Поворачивая рычаг 8 против часовой стрелки можно освободить подвижную планку от храпового механизма и перемещать ее вручную вправо или влево. Другое движение планки - радиальное. Это перемещение отсчитывается по шкале на планке и фиксируется винтами 9. Сначала подготавливаем бумажный диск заготовку и устанавливаем его в устройстве, фиксируя прижимной гайкой. Устанавливаем риски рейки напротив нулевого значения шкалы. Поворачивая рычаг 8, освобождаем планку от храпового механизма, переводим ее в крайнее правое положение и закрепляем. Рычагом 5 ослабляем натяжение троса и поворачиваем диск таким образом, что бы левый крайний зуб рейки совпадал с началом первого сектора заготовки и закрепляем трос. |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||