|
Курсовая работа: Проектирование управляемого привода в электромеханических системахОпределим энергетический запас двигателя:
1.6 Выбор рабочей траекторииДля выбора программной траектории движения нагрузки необходимо проанализировать достоинства и недостатки каждой из двух возможных траекторий, а также пар двигателей, чтобы в итоге остановиться на одной траектории и выбрать один из четырех двигателей. Сравним двигатели, выбранные для данных
траекторий. Скорости вращения двигателей типа ДВИ-211–02 и СД-150 для первой
траектории очень большие ( Как для первой, так и для второй траектории, все двигатели обеспечивают достаточный энергетический запас, но двигатели для второй траектории типа 2ПБ90МУХЛ4 и ДВИ-321–02 обеспечивают больший запас энергии. Необходимо отметить, что изменения, которым подвергается первая программная траектория, снижают качество управляемого привода. Остановим свой выбор на второй из двух возможной траекторий. Для второй траектории движения необходимо выбрать двигатель из двух возможных 2ПБ90МУХЛ4 и ДВИ-321–02. Сравнивая технические характеристики двигателей (таблица 1.6), можем отметить, что двигатель 2ПБ90МУХЛ4 обладает меньшей массой по сравнению с двигателем ДВИ-321–02, и меньшим сопротивлением в якорной цепи, что уменьшает тепловые потери, и меньшим энергетическим запасом. Таким образом, выбираем двигатель типа
2ПБ90МУХЛ4 и соответственно подобранный для него редуктор 5Ч 80 типа
червячный одноступенчатый с передаточным отношением 2. Синтез системы управления электроприводом2.1 Выбор информационных элементов приводаИнформационными элементами привода являются элементы измерителя рассогласований: задающее устройство, датчик обратной связи, сумматор. Вид управляемого привода обуславливает выбор типа информационных элементов: датчиков линейных или угловых перемещений. Приведем статическую ошибку системы, заданную в ТЗ в относительных единицах, к абсолютным единицам.
Допустимая погрешность измерителя
рассогласования
Ошибка измерителя рассогласования
Будем считать, что датчики ДОС и ЗУ абсолютно идентичны, поэтому они вносят одинаковый вклад в статическую ошибку измерителя рассогласования.
Тогда из выражения 2.4 статические ошибки ДОС и ЗУ:
При выборе информационных элементов необходимо исходить из требований технического задания на разработку привода: ·
вида управляемого привода и статической
погрешности датчика ·
максимальных перемещений ·
скорости Исходя из выше изложенных требований к информационным элементам, выберем потенциометр проволочный, характеристики которого представлены в таблице 2.1. Таблица 2.1. Параметры выбранного датчика
2.2 Синтез структурной схемы управляемого приводаСинтез структурной схемы привода начинают с разработки его функциональной схемы.
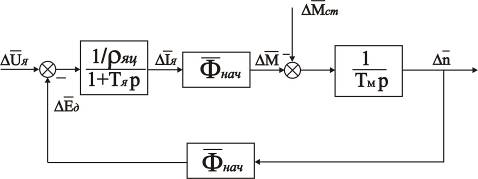
Рис. 2.1. Функциональная схема управляемого привода На рис. 2.1 обозначено: ЗД − задающий датчик (преобразовывает механический сигнал в электрический); ЭС − элемент сравнения (в данном случае сумматор); КУ − корректирующее устройство; УМ − усилитель мощности (формирует напряжение в якорную цепь двигателя); Дв – двигатель, преобразующий напряжение на его входе в угловое перемещение на его выходном валу; Ред – редуктор, понижающий значение углового перемещения на выходном валу двигателя до величины перемещения, необходимого для управления положением рабочей нагрузки; ДОС – датчик обратной связи, обеспечивающий преобразование физического сигнала в форму, удобную для сравнения. Линеаризованная структурная схема двигателя постоянного тока (ДПТ) с независимым возбуждением при управлении по цепи якоря, составленная для приращений переменных двигателя в относительных единицах (о.е.), представлена на рис. 2.2.
Рис. 2.2. Линеаризованная структурная схема ДПТ в о.е. На схеме (рис. 2.2) обозначено:
где
За
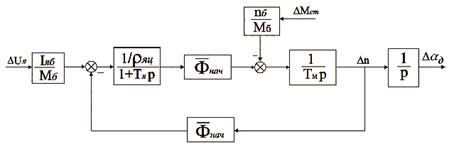
базовые значения угловой скорости вала двигателя Двигатель имеет переменный параметр – Для использования структурной схемы двигателя в общей структуре привода необходимо осуществить в схеме переход от относительных единиц измерения (о.е.) к абсолютным единицам (а.е.). Передаточные функции двигателя по управляющему и возмущающему воздействиям в а.е. могут быть получены из соответствующих им выражений в о.е. при использовании базовых значений параметров, выбранных для совершения прямого перехода в схеме. За базовое значение магнитного потока двигателя
Используя структурную схему двигателя в
относительных единицах (рис. 2.2) и приведенные выше базовые значения
переменных, преобразуем схему, введя масштабирующие коэффициенты,
обеспечивающие измерение в абсолютных единицах передаточных функций двигателя
по управляющему
Рис. 2.3. Линеаризованная структурная схема ДПТ с передаточными функциями в абсолютных единицах (а.е.) Приведем все необходимые параметры для дальнейших расчетов схемы. Двигатель 2ПБ90МУХЛ4
Редуктор червячный одноступенчатый 5Ч 80
Траектория рабочего цикла
Магнитный поток двигателя в рабочей точке (формула 2.6):
Относительное сопротивление якорной цепи (формула 2.7):
Возмущающее воздействие
Для нахождения механической постоянной
двигателя
Минимальное и максимальное значение механической постоянной двигателя
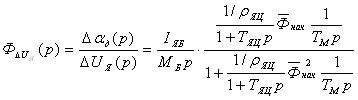
Передаточная функция двигателя по управляющему воздействию
Разделим числитель и знаменатель передаточной
функции на
Найдем минимальное и максимальное значение
электромеханической постоянной времени двигателя
Заметим, что если представить, что
Если Если Определим параметры данной передаточной функции из следующей пары уравнений:
Из уравнения 2.12 выразим параметр
Из уравнения (2.11) определим минимальное и
максимальное значения постоянной времени
Определим значения параметра
Найденные значения
Решим уравнение (2.14):
Корни уравнения:
где
Аналогично решим уравнение 2.15:
Корнями данного уравнения являются:
Таким образом, получим:
Определим коэффициент передачи двигателя:
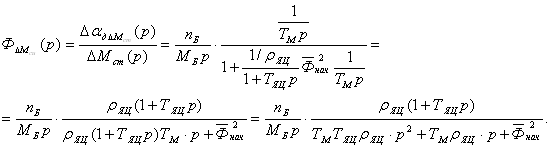
Передаточная функция двигателя по возмущающему воздействию
Разделим числитель и знаменатель передаточной
функции на
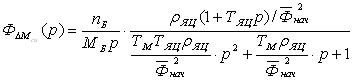
Заметим, что знаменатель передаточной функции двигателя по возмущающему воздействию совпадает со знаменателем передаточной функции по управляющему воздействию. Поэтому представим знаменатель функции (2.18) в следующем виде:
Коэффициенты передачи двигателя:
Для дальнейшего использования составим таблицу со всеми найденными параметрами передаточных функций двигателя (таблицу 2.2). Таблица 2.2. Значения параметров ПФ двигателя
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||

 . (2.5)
. (2.5)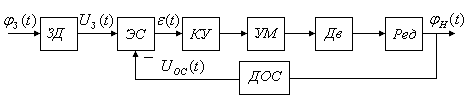
 ,
, , где
, где 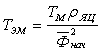 .
. (2.13)
(2.13) ,
, .
.
 .
. . (2.18)
. (2.18) , где
, где  .
.
