|
Дипломная работа: Реконструкция горизонтально-расточного станка повышенной жесткостиAw1 £ Aw2 £ … £ Awk , (35) где Aw1 – межосевое расстояние передач группы, расположенной первой от электродвигателя; Awk – межосевое расстояние передач группы, расположенной последней от электродвигателя. Расчет прямозубой эвольвентной передачи выполнен с использованием программы «SIRIUS 2». Результаты расчета находятся в приложении Б. 2.12 Расчет и построение свертки коробки скоростей 2.12.1 Разработка компоновочной схемы коробки скоростейКомпоновочная схема разрабатывается в следующем порядке: а) определяются расстояния между осями валов и проводятся осевые линии. б) на осях располагаются зубчатые колеса, муфты и другие передачи и механизмы в соответствии с кинематической схемой. При этом нужно обеспечить возможность перемещения подвижных зубчатых колес и муфт, размещения механизмов управления, регулирования подшипников, сборки и разборки узла, а также обратить внимание на то, чтобы передвижные блоки зубчатых колес не сцепились одновременно с двумя неподвижными колесами на смежном валу. в) вдоль оси каждого вала проставляются все соответствующие конструктивные размеры, что позволяет определить его ориентировочную длину. 2.12.2 Вычерчивание свертки коробки скоростей1. Выбирается положение оси первого вала. 2. Из центра первого вала проводится окружность радиусом, равным расстоянию между осью первого вала и осью соседнего вала. Любая точка на этой окружности может быть центром этого вала и будет удовлетворять условию зацепляемости колес. Центр выбирается с учетом возможности рационального расположения и остальных валов. 3. Таким же путем определяются центры других валов. При расположении валов необходимо обеспечить простую форму корпуса, удобство его обработки, сборки и разборки. Нужно стремиться располагать центры валов на одних и тех же линиях, как по вертикали, так и по горизонтали, что делает корпус более технологичным. 2.12.3 Определение усилий действующих в зубчатых зацеплениях На основе построенной свертки выполняется расчетная схема (рисунок 17), представляющая собой условное изображение расчетной цепи зубчатых передач. В полюсе зацепления каждой зубчатой пары, по нормали к боковым поверхностям зубьев, действуют силы Fn, Н, величина которых определяется по формуле:
где m и z – модуль и число зубьев зубчатого колеса; Т – вращающий момент приложенный к валу зубчатого колеса, Н×мм.
Рисунок 17 – Свертка коробки скоростей Сила Рn12, Н, действующая со стороны шестерни на первом валу на зубчатое колесо второго вала:
Сила Рn23, Н, действующая со стороны шестерни на втором валу на зубчатое колесо третьего вала:
Сила Рn34, Н, действующая со стороны шестерни на третьем валу на зубчатое колесо четвёртого вала:
Сила Рn45, Н, действующая со стороны шестерни на четвертом валу на зубчатое колесо пятого вала:
Сила Рn56, Н, действующая со стороны шестерни на пятом валу на зубчатое колесо шестого вала:
Необходимо определить реакции в каждой опоре с помощью уравнений статики, которые имеют следующий вид:
где SFkx – сумма всех сил, действующих в плоскости Ozx; SFky – сумма всех сил, действующих в плоскости Ozy; SmO(Fk) – сумма моментов сил относительно выбранной точки плоскости. 2.13.2 Выбор подшипников по статической грузоподъемностиКритерием для подшипника служит неравенство: P0 £ C0 , (38) где Р0 – эквивалентная статическая нагрузка; С0 – табличное значение статической грузоподъемности выбранного подшипника. Величины приведенной статической нагрузки для радиальных подшипников определяются как большие из двух следующих значений: P0 = X0Fr + Y0Fa ; P0 = Fr , (39) где Х0 – коэффициент радиальной нагрузки; Y0 – коэффициент осевой нагрузки; Fr – постоянная по величине и направлению радиальная нагрузка, Н; Fа – постоянная по величине и направлению осевая нагрузка, Н. 2.13.3 Выбор подшипников по динамической грузоподъемностиКритерием для выбора подшипника служит неравенство: Стр. £ С , (40) где Cтр. – требуемая величина динамической грузоподъемности подшипника; С – табличное значение динамической грузоподъемности выбранного подшипника. Требуемая динамическая грузоподъемность Стр, Н, определяется по формуле:
где Р – эквивалентная динамическая нагрузка, Н; n – частота вращения вала для которого подбирается подшипник, об/мин; Lh – долговечность подшипника, выраженная в часах работы; a – коэффициент, зависящий от формы кривой контактной усталости. Эквивалентная динамическая нагрузка Р, Н, для шариковых радиально-упорных подшипников определяется по формуле: P = (XVFr + YFa)KбKт , (41) где Fr – радиальная нагрузка, приложенная к подшипнику; Fa – осевая нагрузка, приложенная к подшипнику; V – коэффициент вращения; Kб – коэффициент безопасности; Kт – температурный коэффициент. Расчет подшипников качения выполнен с использованием программы «SIRIUS 2». Результаты расчета находятся в приложении Г. 2.14 Расчет сечения сплошного вала 2.14.1 Определение диаметра средних участков валаПод средними участками вала следует понимать участки, на которых расположены шестерни и зубчатые колеса. Определение диаметра производится расчетом на изгиб с кручением. После завершения расчета, разрабатывается конструкция каждого вала, которая должна обеспечивать возможность сборки коробки скоростей и свободного продвижения зубчатых колес до места посадки. 2.14.2 Расчет валов на усталостную прочностьРасчет сводится к определению расчетных коэффициентов запаса прочности для предположительно опасных сечений валов. Условие прочности в данном расчете, имеет вид:
где n – расчетный коэффициент запаса прочности; [n] = 1,3 ¸1,5 – требуемый коэффициент запаса для обеспечения прочности; [n] = 2,5 ¸ 4 – требуемый коэффициент запаса для обеспечения жесткости; ns – коэффициент запаса прочности по нормальным напряжениям; nt – коэффициент запаса прочности по касательным напряжениям.
где s -1 и t -1 – пределы выносливости для материала вала при симметричных циклах изгиба и кручения, МПа; sа, tа и sm, tm – амплитуды и средние напряжения циклов нормальных и касательных напряжений, МПа; ks и kt – эффективные коэффициенты концентрации напряжений при изгибе и при кручении; es и et – масштабные факторы для нормальных и касательных напряжений; ys и yt – коэффициенты, учитывающие влияние постоянной составляющей цикла на усталостную прочность. Можно считать, что нормальные напряжения, возникающие в поперечном сечении вала от изгиба, изменяются по симметричному циклу, тогда:
где Мизг. – суммарный изгибающий момент в наиболее нагруженном сечении, Н×мм; W – момент сопротивления сечения при изгибе, мм3. Для круглого сечения вала:
Для круглого сечения со шпоночной канавкой:
где b и t – ширина и высота шпоночной канавки, мм. Для сечения вала со шлицами:
где x = 1,125 – для шлицев легкой серии; x = 1,205 – для шлицев средней серии; x = 1,265 – для шлицев тяжелой серии. Так как момент, передаваемый валом, изменяется по величине, то при расчете принимают для касательных напряжений наиболее неблагоприятный знакопостоянный цикл – отнулевой: где Wк – момент сопротивления вала при кручении, мм3. Для круглого сечения вала:
Для сечения вала со шпоночной канавкой:
Для сечения вала со шлицами:
2.14.3 Расчет на прочность шпонок и шлицевых соединений Условие прочности по смятию для призматической шпонки имеет вид:
где z – число шпонок; sсм.– напряжение смятия, МПа; [s]см. – допускаемое напряжение при смятии, МПа; lp– рабочая длина шпонки, мм; d – диаметр вала, мм; h – высота шпонки, мм. Условие прочности из расчета на срез шпонки:
где [t]ср. – допускаемое напряжение при срезе, МПа. Расчет шлицевых соединений условно производят на смятие втулки в месте ее соприкосновения с боковыми поверхностями зубьев.
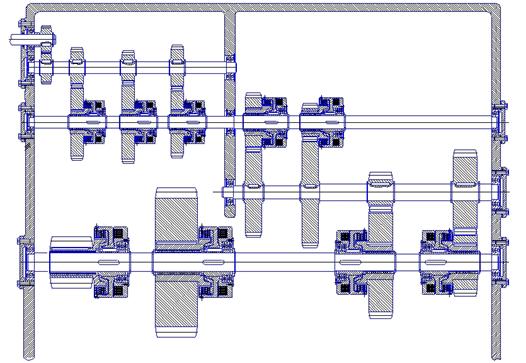
где y = 0,7¸0,8 – коэффициент, учитывающий неравномерность распределения нагрузки по зубьям; z – число зубьев; l– рабочая длина зуба вдоль оси вала, мм; h – рабочая высота контактирующих зубьев в радиальном направлении, мм; rср. – средний радиус, мм. Расчет сечения сплошного вала выполнен с использованием программы «SIRIUS 2». Результаты расчета находятся в приложении Г. В результате проведенных расчетов можно построить компоновочную схему развертки коробки скоростей.
Рисунок – Развертка коробки скоростей3. Проектирование шпиндельного узла 3.1 Тепловой расчет шпиндельного узлаТепловой расчет шпиндельного узла осуществляется на основе решения осесимметричной задачи методом конечных элементов. В качестве типового конечного элемента в данном случае принимается треугольник. Для упрощения формирования расчетной схемы, используется процедура триангуляции четырехугольных элементов, представляющих собой фигуры, полученные при разбиении осевого сечения шпинделя. Под разбиение попадают шпиндель и все элементы установленные на нем за исключением источников тепла, которыми в данном случае являются опоры качения. Температура аппроксимируется на каждом элементе полиномом, который определяется с помощью узловых значений температуры Ti. Вариационная формулировка МКЭ для (22) связана с минимизацией функционала: - для плоской задачи Э:
- для осесимметричной задачи C:
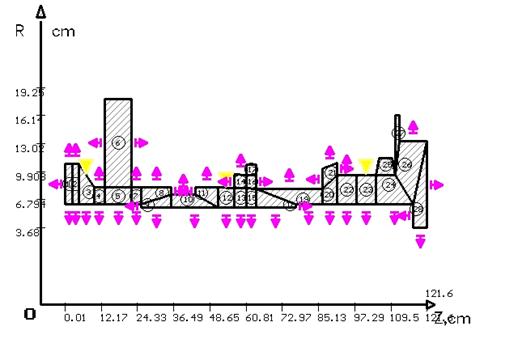
где S1 и S2 —поверхности с заданными граничными условиями второго и третьего родов соответственно. Расчет выполняется в следующем порядке: а) назначается количество четырехугольных областей, необязательно правильной формы, в соответствии с условиями однозначности. б) назначаются граничные условия (конвективный теплообмен и мощности тепловыделения). в) назначаются исходные данные для расчета мощности тепловыделения и коэффициентов теплоотдачи по теплоотдающим поверхностям. г) вводятся условия для выполнения теплового расчета (время и номера узлов). В соответствии с указанными условиями составляется расчетная схема шпинделя (рисунок 19), используемая для последующего расчета на ЭВМ. Для теплового расчета шпиндельного узла был использован пакет программа «TEMOS».
Рисунок 19 – Расчетная схема шпиндельного узла при тепловом расчете
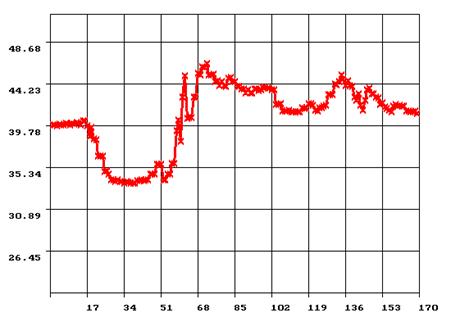
Рисунок 20 – Температурное поле шпиндельного узла
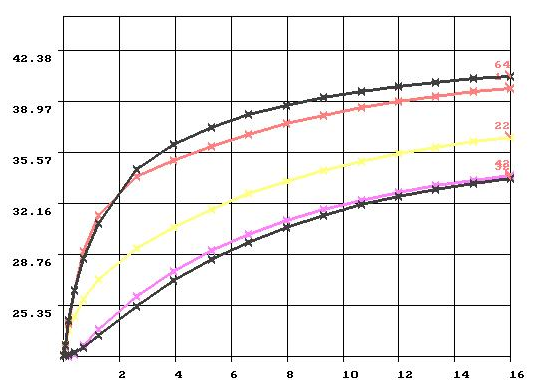
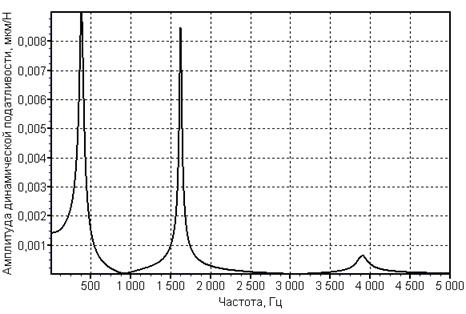
Рисунок 21 – Температурное поле отдельных узлов шпинделя 3.2 Динамический расчет шпиндельного узла 3.2.1 Динамические характеристики шпиндельного узла На точность работы шпинделя оказывают влияние и динамические характеристики шпиндельного узла, которые являясь показателями динамического качества ШУ, достаточно точно определяют амплитуды колебаний переднего конца шпинделя. Формы колебаний и их анализ позволяют наглядно представить характер деформирования основных элементов ШУ. Формы колебаний также дают представление о размере колебаний по всей длине шпинделя, что важно для правильного конструирования ШУ. Низшие собственные частоты колебаний – важные характеристики ШУ, так как практически невозможна работа в резонансной зоне с частотой вращения, близкой к собственной частоте fс (в интервале ±20%).
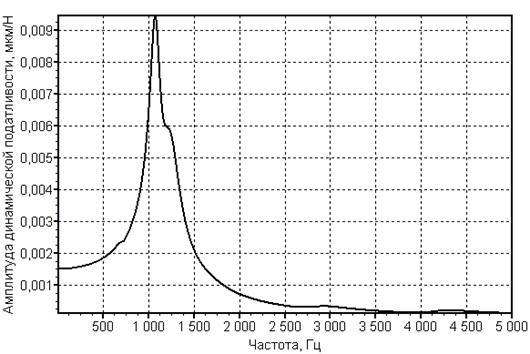
Рисунок 22 – АЧХ шпиндельного узла по координате Х
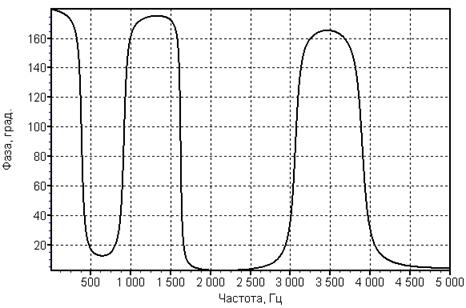
Рисунок 23 – ФЧХ шпиндельного узла по координате Х
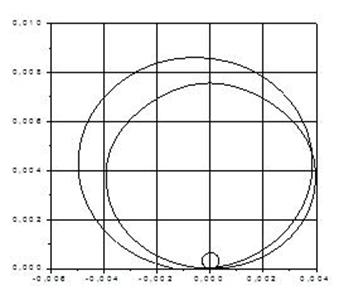
Рисунок 24 – АФЧХ шпиндельного узла по координате Х
Рисунок 24 - АЧХ шпиндельного узла по координатам Y и Z
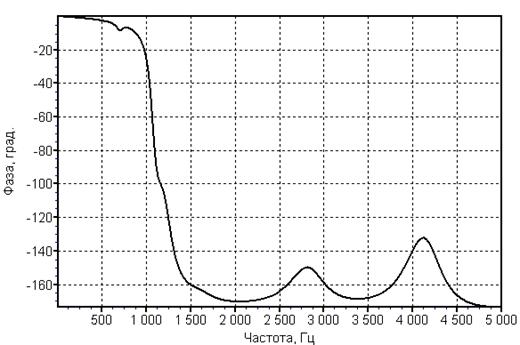
Рисунок 25 – ФЧХ шпиндельного узла по координатам Y и Z
Рисунок 26 – АФЧХ шпиндельного узла по координатам Y и Z 3.2.2 Динамический анализ Уравнение равновесия для стержневого конечного элемента, без учета гироскопического эффекта и действия центробежных сил, может быть записано в виде:
где [Ce] – матрица коэффициентов демпфирования;
При допущении того, что материал стержня не оказывает существенного воздействия на демпфирование колебаний, которое осуществляется, главным образом, посредством упругих демпферов (пружин), расположенных в узлах стержневого элемента, матрица коэффициентов демпфирования принимает вид:
где
CDOF – коэффициент демпфирования по соответствующей линейной (угловой) координате, Н×с/м (Н×м×с/рад); DOF – индекс, характеризующий степень свободы в рассматриваемом узле; j – номер строки; k – номер столбца; Матрицы [Me], [Ke], {u} и {F} идентичны матрицам, используемым при статическом анализе. По аналогии со статическим анализом уравнение равновесия для модели, состоящей n элементов, используемое при динамическом анализе, принимает вид:
где [Mg] – глобальная матрица масс модели;
[Cg] – глобальная матрица коэффициентов демпфирования;
Глобальная матрица масс [Mg] формируется путем последовательного суммирования соответствующих коэффициентов в элементных матрицах, то есть:
Матрицы [Kg],
При динамическом анализе шпиндельного узла наибольший интерес представляют его частотные характеристики, определяемые при изменении входной координаты во времени по закону гармонических колебаний. Частота этих колебаний изменяется теоретически от нуля до бесконечности, а практически – в пределах некоторого диапазона частот, который называют рабочим. Для рассматриваемой модели входной координатой является сила или момент силы. Поэтому глобальный вектор узловых нагрузок принимает следующую форму:
или где Fmax – амплитудное значение силы (момента), Н (Н×м); е – основание натуральных логарифмов;
y – сдвиг силы по фазе, рад; w – угловая скорость, рад/с; t – время, с; {F1} и {F2} – вещественная и мнимая часть вектора нагрузки, определяемые по формулам:
При изменении входной координаты по гармоническому закону выходная координата (перемещение) также будет изменяться гармонически. Таким образом, глобальный вектор узловых перемещений должен быть представлен в следующем виде:
или где {umax} – амплитудное значение линейного (углового) перемещения, м (рад); j – сдвиг перемещения по фазе, рад; {u1} и {u2} – вещественная и мнимая часть вектора перемещений, определяемые по формулам:
После подстановки выражений (3.61) и (3.60) в формулу (2.51) уравнение равновесия динамической модели шпиндельного узла принимает вид:
Решение полученного уравнения относительно неизвестных узловых перемещений имеет следующий вид:
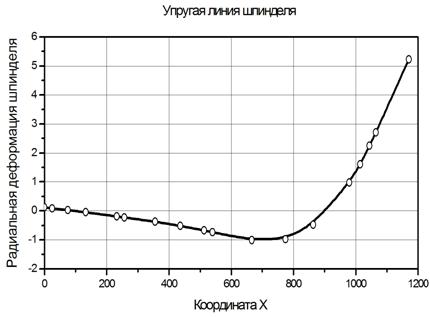
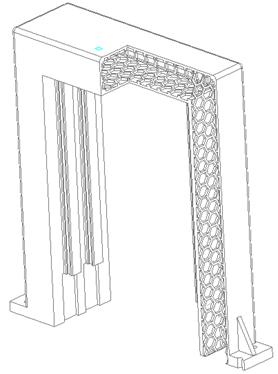
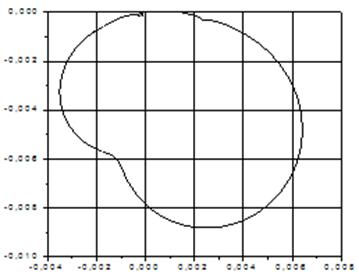
Рисунок 27 – Упругая линия шпинделя 4. Проектирование стойки станка 4.1 Компоновка стойки В связи с тем, что задачей данного дипломного проекта является реконструкция горизонтально-расточного станка повышенной жесткости, одной из основных задач является проектирование шпиндельной бабки с более высокими динамическими и статическими характеристиками. Изучив конструкцию базового станка и рассмотрев все возможные варианты ее реконструкции, была рассчитана и спроектирована стойка с улучшенными характеристиками, по сравнению с базовым вариантом. При проектировании новой стойки были учтены и по возможности использованы все достижения современной науки. В частности внутренняя часть стойки имеет сотовую конструкцию. Такая конструкция позволяет снизить массу примерно на 1\3 часть, но при этом повысить жесткосные и теплодеформационные характеристики стойки.
Рисунок 29 – Стойка реконструированного станка с вырезом Стойка крепится к станине с помощью прямоугольных направляющих, которые могут располагаться горизонтально и вертикально. Также к стойке крепятся направляющие для вертикального перемещения шпиндельной бабки. Стойка также крепится к фундаменту при помощи фундаментных болтов. 4.2 Расчет направляющих Методика расчета направляющих состоит из следующих этапов: а) определение суммарных давлений, действующих на каждую грань направляющих; б) определение среднего удельного давления на каждой из этих граней; в) определение наибольшего удельного давления на них; г) сопоставление полученных величин с наибольшими допускаемыми значениями удельных давлений; Давления на грани направляющих А,Б,С находят из условий равновесия. Также на стойку действуют составляющие Px, Py, Pz силы резания, собственный вес стойки G. Удельные давления:
где – L – длина направляющих а, b, c – значения рабочей ширины граней направляющих
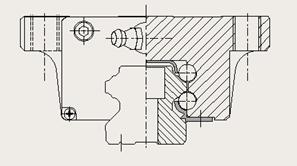
Рисунок– Направляющие качения для шпиндельной бабки 5 Проектирование шпиндельной бабки 5.1 Компоновка шпиндельной бабки В связи с тем, что бала изменена несущая система и кинематика станка, была спроектирована новая шпиндельная бабка.
Рисунок 31 – Шпиндельная бабка реконструированного станка модели 2А622 Спроектированная шпиндельная бабка обладает повышенной жесткостью по сравнению со старой. Вертикальное перемещение бабки вдоль стойки происходит по линейным направляющим качения с помощью двух ходовых винтов, что обеспечивает повышенную точность обработки деталей. |
|
|||||||||||||||||||||||||||||
|
|||||
Рефераты бесплатно, реферат бесплатно, сочинения, курсовые работы, реферат, доклады, рефераты, рефераты скачать, рефераты на тему, курсовые, дипломы, научные работы и многое другое. |
||
При использовании материалов - ссылка на сайт обязательна. |
||


 (41)
(41) (42)
(42)
 (43)
(43) (48)
(48) (52)
(52) (53)
(53) (54)
(54)


 (56)
(56)
 – индекс узла
– индекс узла (61)
(61)